Полиспасты: назначение, устройство, виды
Необходимость поднимать и передвигать грузы возникла еще в глубокой древности по всему миру при возведении Колизея, Великой Китайской стены и т. д. Наши предки изобрели механизм под названием «полиспаст», основной принцип работы которого до сих пор актуален. Он состоит из множества блоков, их затягивают тросом. Практически у всех полиспастов назначение и устройство одинаково. По потребностям сборку рассчитывают на том, чтобы усилить показатели в силе и скорости.
Содержание
Назначение и применение полиспаста
Грузоподъемные механизмы конструктивно отталкиваются от правила рычага и силы трения, чтобы увеличить силу или скорость подъема объекта. Два ключевых элемента устройства полиспаста составляют основу работы данного механизма:
- Неподвижный шкив является элементом, который прикрепляется к технике или иному крепкому статичному элементу. Он выполняет функцию распределения давления между элементами конструкции.

- Подвижный шкив, присоединяясь к грузу при помощи оснащенного крюка, должен выдержать максимально возможное давление и поддержать работоспособность механизма.
Тросы соединяют элементы конструкции. Неподвижный шкив состоит из роликов, по каждому из которых проводится цепь или канат, что позволяет сократить давление на каждый ролик путем увеличения количества рабочих ветвей, таким образом для подъема тяжелого груза нужно рассчитать и организовать подходящее количество роликов.
- Полиспаст на кране подъемном используется с усиленными силовыми показателями, его также применяют на такелажных приспособлениях, на малых судах. Подвесные конструкции, в которых натягиваются подвесные силовые линии, машины, переправы, перила, подъемные конструкции в спорте уже много лет практикуют использование полиспастов для облегчения работы.
- Полиспасты с усиленными скоростными показателями применяются гидравлических и пневматических системах подъема.
- Когда нужно поднять или спустить тяжелые объекты необходим механизм, который способен поддержать постоянное давление на опорах мостового, козлового и консольного кранов, активно применяется сдвоенный грузоподъемный механизм.

Одной из главных характеристик подобного механизма по праву считается его кратность. Данная характеристика этого устройства рассчитывается следующим образом:
- скорость, с которой движется подвижная ветвь механизма ÷ скорость, с которой поднимается груз;
- число ветвей троса с подвешенным грузом ÷ число ветвей троса, присоединенных к барабану.
При подобном расчете мы определяем мы можем определить коэффициент выигранной силы или скорости по итогу использования данного механизма. Изменить кратность полиспаста можно, добавляя или удаляя дополнительные шкивы системы, соблюдая следующие условия:
- Если дополнительные шкивы суммарно составили нечетное количество, их нужно прикрепить конец троса на неподвижном шкиве.
- Если дополнительные шкива суммарно составили четное количество, их нужно прикрепить конец троса на крюковую обойму.
Устройство
Таким образом, мы видим схему простейшего устройства полиспаста:
Барабан привода изображен при помощи большого круга, небольшие круги обозначают шкивы системы. На схеме указаны два вида запасовки троса/ цепи:
На схеме указаны два вида запасовки троса/ цепи:
- Схема полиспаста слева отображает фиксацию одного конца каната/цепи на неподвижном шкивы, а второго — на барабане привода.
- Схема справа отображает фиксацию троса/цепи на тяговом механизме, а также на оси подвижного элемента.
Более продвинутые системы полиспаста состоят из трех и более подвижных и неподвижных частей, которые затягиваются канатом при определенной последовательности. Усложненная схема полиспаста выглядит следующим образом:
Работает полиспаст при помощи двух неподвижных шкивов, которые закреплены на поверхности, и два — подвижных. Два его шкива неподвижно закреплены к поверхности, другие — движутся. Подобная схема примерно в четыре раза сокращает давление, оказываемое на привод при тяговом усилии на трос. Точность этой примерно разницы составляет 93-97%, изменяясь в зависимости от качества использованных элементов и точности исполнения конструктивных решений.
Если потребуются определить точный КПД действия полиспаста или рассчитать схему подъема сложного механизма, нужно обратиться к точным формулам. К тому же, без них нельзя обойтись из-за того, что создать идеальные условия в обычной жизни практически невозможно и потому что на конструкцию также действует сила трения, которая создается при движении шкивов по канату/цепи в процессе вращения ролика вне зависимости от используемых подшипников. К негативным факторам дополнительно относится отсутствие на стройплощадке и в комплекте стройтехники гибкого и податливого каната. Жесткость стальных тросов и цепей вынуждает прикладывать дополнительные усилия для перемещения груза, что также важно учитывать.
К тому же, без них нельзя обойтись из-за того, что создать идеальные условия в обычной жизни практически невозможно и потому что на конструкцию также действует сила трения, которая создается при движении шкивов по канату/цепи в процессе вращения ролика вне зависимости от используемых подшипников. К негативным факторам дополнительно относится отсутствие на стройплощадке и в комплекте стройтехники гибкого и податливого каната. Жесткость стальных тросов и цепей вынуждает прикладывать дополнительные усилия для перемещения груза, что также важно учитывать.
Существует уравнение моментов сил для полиспастов:
Элементы формулы расшифровываются подобным образом:
- Sс– сила движения сбегающего веревки/цепи.
- Sн – сила движения набегающего веревки/цепи.
- q*Sн– усилие, которое нужно приложить для сгибания или разгибания веревки/цепи с учетом жесткости этого каната равному q.
- N*f – сила трения, учитывая коэффициент трения в блоке равному f.

Если необходимо определить момент, все силы нужно умножить на плечо, которое равняется радиусу шкива R.
Сила, с которой набегает и сбегает веревка/цепь образуется, когда нити веревки/цепи начинают взаимодействовать и создают трение. Учитывая тот факт, что усилие, которое нужно приложить для сгибания или разгибания веревки/цепи оказывается ниже вышеперечисленных, регулярно пренебрегают расчетом воздействия на ось блока:
Это уравнение расшифровывается следующим образом:
N – уровень воздействия на ось блока.
Sн – сила движения набегающего веревки/цепи (можно использовать значение принимается примерно равным Sс).
sin(a) – градус угла. с которым отклоняется веревка/цепь от оси.
Далее получаем формулу расчета КПД блока полиспаста:
Принцип работы полиспаста
Сквозь статичный шкив для подъема груза перекидывается канат/цепь, груз поднимается при прикладывании усилий, сопоставимых с исходным весом. Через эту конструкцию пропускается цепь. Высота, на которую поднимается груз должна быть равной длине каната. Такая схема не позволяет сократить ни силовые, ни скоростные показатели процесса перемещения груза.
Высота, на которую поднимается груз должна быть равной длине каната. Такая схема не позволяет сократить ни силовые, ни скоростные показатели процесса перемещения груза.
Вдвое сократить затраченные усилия при применении грузоподъемного механизма возможно, конец веревки фиксирует систему на статичном шкиве, а специальный подвижный ролик и крюк подвешивается к грузу. В таком случае подвижный шкив механизма передвигается параллельно грузу и усилия, которые нужно затратить на его подъем, сокращаются. В этих несложных манипуляциях и основывается работа подобного грузоподъемного устройства.
Главная задача неподвижных блоков — создать путь перемещения каната/веревки, не давая сократить затрачиваемые усилия. Подвижные шкивы, прикрепляясь к грузу, способны выиграть в усилиях. Можно двукратно сократить прилагаемые усилия на подъем груза, при помощи увеличения состава системы конструкции на парные шкивы, состоящие из подвижного и статичного шкивов, отталкиваясь от количества подвижных роликов.
Виды полиспастов
Силовыми механизмами называются системы, позволяющие экономить усилия на поднятие или перемещение груза за счет сокращения скорости его поднятия или перемещения, таким образом, сэкономленные усилия обратно пропорциональный затраченной скорости.
Также существуют скоростные механизмы, рычагом в таких системах является веревка, но усилия направляются на скорость подъема груза, что очень актуально для гидравлических систем.
Существуют следующие виды полиспастов:
- Одинарные силовые полиспасты, в таких системах груз необходимо подвесить к подвижному блоку, а рабочие ветви берут на себя тяговые усилия. При использовании силовых систем нужно учитывать необходимость наличия у барабана нарезки в одну сторону, так как один конец канта/цепи будет прикрепляться к нему, а второй — к неподвижному блоку или обойме крюка.
- Скоростные полиспасты, в таких системах груз необходимо подвесить к концу рабочей ветви, а усилия прикладываются в отношении подвижного блока.
- Сдвоенные силовые полиспасты, в таких системах груз оба конца веревки/цепи прикрепляться к барабану с нарезкой в две стороны. Уравнительный верхний блок выравнивает длину ветвей каната, в случае если они неровно вытянуты.

Что влияет на эффективность подъемника?
В предыдущих разделах статьи упоминалось о приблизительной кратности полиспастов. что округляется в большую сторону. Однако в реальном использовании механизма, она часто оказывается ниже указанного. Какие же факторы влияют на подъемник и его эффективность?
Нужно обратить внимание на следующие вопросы:
- Сколько блоков было использовано?
- Из какого материала сделана веревка/канат?
- Какой тип подшипников был использован?
- Качественно ли были смазаны все элементы полиспаста?
- Был использован канат расчетного диаметра и длины?
- Чему был равен градус угла каната и плоскости ролика?
Как крепится веревка к механизму?
Существует несколько способов крепления этой конструкции к цепи:
- Необходимо применять репшнуры и обмотать узлами в 3-6 оборота.
- Прикрепить конструкцию можно также при помощи различных зажимов.

Запасовка полиспастов
В момент, если возникает необходимость изменить скорость или высоту подъема груза проводят запасовку, а именно изменяют расположение блоков и межблочное расстояние.
Запасовка полиспастов используется в следующих формах:
- Однократная запасовка, являясь наименее эффективной, применяется на стреловых кранах, где крюк подвешивается на 1 цепи, проводится через все статичные шкивы и наматывается на барабан.
- Двукратная запасовка, применяясь на балочных кранах со стрелами, с одной стороны цепи прикрепляется к началу стрелы, а другой конец цепи пропускаются через обводной барабан и закрепляется лебедкой.
- Четырехкратная запасовка является наиболее мощной и популярной в связи с большой грузоподъемностью. Ее особенностью является использования поочередно схемы двукратной и однократной запасовок, прикрепляя каждый блок к крюковой подвеске.
- Четвертый вид запасовки предусматривает дополнение подвижных роликов одной или двумя подвижными обоймами.

Современная жизнь, как и жизнь наших предков несколько тысячелетий назад, очень сильно бы усложнилась при отсутствии такого полезного механизма. Начав историю своего использования со строительства и машиностроения, полиспаст стал обязательным элементом обыденной жизни. В связи с этим, знать, что это и как им пользоваться, должен каждый.
Устройство, принцип работы и виды полиспастов, обзор систем.
Подъем тяжелого груза даже на небольшую высоту без применения специальных инструментов возможен не всегда. Речь идет не только про подъемные краны, автокраны и погрузчики — есть и другие приспособления для решения этой задачи.
Одним из механизмов для подъема грузов является полиспаст.
Содержание
- Что такое полиспаст, зачем он нужен и где применяется?
- Устройство и принцип работы
- Виды полиспастов
- Что влияет на эффективность подъемника?
- Как крепится веревка к механизму?
- Что такое запасовка, как она делается и какой бывает?
- Как сделать полиспаст своими руками?
Что такое полиспаст, зачем он нужен и где применяется?
 youtube.com/embed/nbbklUjHmxQ» frameborder=»0″ allowfullscreen=»allowfullscreen»/>
youtube.com/embed/nbbklUjHmxQ» frameborder=»0″ allowfullscreen=»allowfullscreen»/>Полиспаст — блочная система с цепной или канатной передачей. Ее задача — упростить и ускорить подъем любого тяжелого груза, используя человеческую силу. Такие схемы (или их близкие аналоги) использовались еще до нашей эры — при строительстве египетских пирамид и Великой Китайской стены.
Стационарно подъемники применяются на складах и в производственных помещениях, в которых необходимо поднимать разные тяжести. Переносные блочные системы используются в строительстве, логистике, для спасательных работ.
Устройство и принцип работы
Полиспаст позволяет поднимать тяжесть, используя меньшее усилие человека. Принцип похож на действие рычага для подъема груза, только вместо рычага используется трос.
Конструктивно, самый простой полиспаст являет собой 1 блок и веревку. Ролик закрепляется над грузом (на потолке, балке, или перемещаемой специальной опоре). Один конец веревки с крюком спускается к грузу. Второй конец веревки человек держит в руках и тянет за него, поднимая тяжесть.
Один конец веревки с крюком спускается к грузу. Второй конец веревки человек держит в руках и тянет за него, поднимая тяжесть.
На выигрыш в силе влияют такие факторы:
- Количество роликов.
- Длина веревки.
1 блок увеличивает силу примерно в 2 раза (примерно — потому что какие-то потери спишутся из-за силы трения). То есть если человек без подъемника сможет поднять 30 кг на высоту 1 метр, то с полиспастом — это будут уже 60 кг. Если роликов будет больше — то и вес можно будет поднимать больший.
Что касается длины веревки: чем она длиннее, тем больше вес сможет поднять человек, но и тем больше времени на это придется тратить.
Виды полиспастов
Полиспасты делятся по нескольким признакам:
- По назначению. Бывают силовые, а бывают скоростные схемы. Силовые позволяют поднимать больше груза, но медленнее. Скоростные позволяют поднимать тяжесть быстрее, но «осилят» меньший вес.
- По количеству блоков. Самый простой вариант — 1 ролик. Но их может быть и 2, и 3, и 4, и больше. Чем больше их — тем больший вес получится поднять.
- По сложности схемы. Бывают простые схемы (когда ролики объединены последовательно 1 канатом) и сложные (когда используется 2 или больше отдельных полиспастов). Сложные системы более производительны, дают больше результата при меньшем количестве блоков. К примеру, если объединить 2 полиспаста (из 1 и из 2 блоков) — получится выигрыш в силе в 6 раз. Тогда как простая схема даст выигрыш в 6 раз только при использовании 6 роликов.
 Но их может быть и 2, и 3, и 4, и больше. Чем больше их — тем больший вес получится поднять.
Но их может быть и 2, и 3, и 4, и больше. Чем больше их — тем больший вес получится поднять.Что влияет на эффективность подъемника?
Выше упоминалась кратность (выигрыш в силе) очень приблизительная, округленная в большую сторону. На практике она меньше.
На эффективность подъемника (на то, какой точный выигрыш в силе он даст) влияют такие факторы:
- количество блоков;
- материал троса;
- тип подшипников;
- качество смазки всех осей;
- диаметр и длина каната;
- угол между канатом и средней плоскостью ролика.

Как крепится веревка к механизму?
Закрепить грузоподъемный механизм к тросу можно следующими способами:
- Узлами, связанными из репшнуров. Количество оборотов — 3-5.
- Зажимом общего назначения.
Что такое запасовка, как она делается и какой бывает?
Запасовкой называют изменение положения блоков и расстояния между ними. Ее проводят, чтобы изменить скорость или высоту подъема тяжести.
Схемы запасовки бывают:
- Однократная: крюк вешают за 1 канат, который затем проводится последовательно через каждый неподвижный блок и наматывается на барабан.
- Двукратная. Для балочных кранов 1 конец веревки крепят на корне стрелы, а второй конец пускают через обводной барабан, все блоки, после чего крепят к лебедке. Для подъемных кранов канат крепится к лебедке, а неподвижные блоки находятся на головке стрелы.
- Четырехкратная. Используется сочетание схем, перечисленных выше, для каждого блока крюковой подвески.
- Переменная. Подвижные ролики дополняются 1 или 2 подвижными обоймами.

Как сделать полиспаст своими руками?
Рассмотрим схему создания двукратного полиспаста.
Понадобится:
- 2 втулки.
- 2 ролика.
- 2 обоймы.
- Подшипники.
- Крюк (чтобы цеплять груз).
- Канат.
Пошаговая конструкция:
- Втулки, ролики и подшипники соединяются и вставляются в обойму. В результате получается 2 вращающихся блока.
- Трос пропускают через блок.
- Обойма с пропущенным канатом крепится к опоре, под которой будет располагаться груз.
- Второй конец каната пропускается через второй блок.
- Ко второй обойме крепят крюк.
- Оставшийся висеть конец каната фиксируют (за него необходимо будет тянуть для подъема груза).
После этого останется только закрепить груз (подцепить его крюком), и можно начинать подъем.
назначение и устройство, их кратность
Содержание
Введение
Полиспаст – это подъемная конструкция, которая была изобретена еще во времена великого мыслителя Архимеда. Сейчас нельзя точно установить, кто был тем самым гением, но уже упомянутый философ также прикладывал свою руку к развитию этой конструкции. Иначе еще называют системой блоков, из-за основного назначения и имеющихся в то время противовесов, в виде блоков известняка.
Блоки и полиспасты, назначение и устройство которых сейчас для обычного человека, привыкшего к высоким технологиям, выглядит довольно примитивно. Но стоит учесть тот факт, что именно благодаря этому механизму были построены великие исторические сооружения, такие как пирамиды, Пантеон, Колизей и тому подобные. Но технология не осталась на страницах учебников, а продолжала свое развитие, адаптируясь под появляющуюся технику и нужды людей.
Описание и устройство полиспастов
Сама по себе конструкция представляет устройство для поднятия грузов с использованием специальных блоков соединения и канатами между ними. Используя правило рычага и силу трения конструкция приходит в действие увеличивая силу или скорость подъема объекта. Имеются разные типы полиспастов, которые различаются по количеству блоков, канатных соединений, грузоподъемности и прочим конфигурациям.
Используя правило рычага и силу трения конструкция приходит в действие увеличивая силу или скорость подъема объекта. Имеются разные типы полиспастов, которые различаются по количеству блоков, канатных соединений, грузоподъемности и прочим конфигурациям.
Система в свою очередь состоит из подвижных и неподвижных элементов, по которым проведены канаты, создающие натяжение и обеспечивающие транспортировку груза. Неподвижный элемент представляет собой основную конструкцию, которая крепится к технике или статичной планке, а подвижный элемент присоединяется к грузу. Поэтому первый должен быть способен выдержать большое давление, а второй равномерно его распределить.
Нижний или подвижный блок обычно оснащен специальным креплением, в виде крюка, мощного магнита, карабина и так далее. Верхний блок имеет специальные ролики, по которым проводится канат и от количество роликов зависит оказываемое давление на каждый канат в отдельности. А это означает что для подъема больших тяжелых грузов требуется соответствующие количество роликов и рабочих ветвей.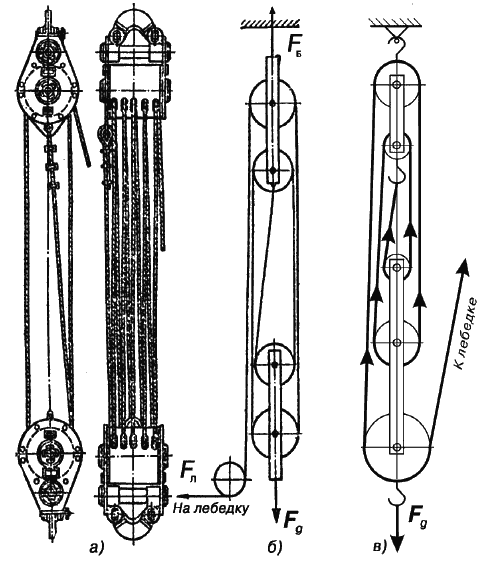
В видео рассказывается и демонстрируется, как работает полиспаст, а также раскрываются его преимущества
Назначение
Учитывая тот факт, что этому изобретение больше двух тысяч лет, оно применялось для выполнения невообразимого количество работ и задач. За частую это строительная сфера, где полиспасты используются в подъемных кранах, лебедках и тому подобное. Также механизму нашли применения на суднах, для спуска и подъема спасательных шлюпок. Некоторое время использовался в первых прототипах лифта, до появления гидравлических и электрических приводов.
Полиспасты, назначение и устройство, кратность их менялось и находило применение в спорте, а именно, в скалолазание и других экстремальных занятиях на больших высотах. Также долгое время спасательные отряд в горных местностях были оснащены устройствами, чтобы вытаскивать пострадавших из труднодоступных мест. Еще часто можно встретить использование блоков в электрических проводках, а точнее для создания натяжения кабельной сети.
Еще часто можно встретить использование блоков в электрических проводках, а точнее для создания натяжения кабельной сети.
Разновидности полиспастов
Все полиспасты можно разделить на две категории:
- силовые;
- скоростные.
Исходя из названия определяется и основе назначение каждого вида. Первый самый распространённый и используется для поднятия грузов, в точности, каким и был изобретен. Скоростной вариант — это видоизменённая конструкция, где большие усилия направлены на увеличение скорости транспортировки. По этому принципу создаются канатные дороги на горнолыжных курортах.
Кроме этого различие заключается в количестве роликов и рабочих ветвей, а также прочими модификациями. К конструкции может быть подключен электрический привод и стоппер. Еще разница заключается в материала каната, ведь он может быть представлен в виде:
- веревки;
- металлического каната;
- железной цепи;
- электрического кабеля.

В строительной технике чаще всего используется второй вариант, из-за прочности материала. Веревочные канаты используются чаще всего в туризме, спасательных операциях и так далее. Использование железной цепи встретить можно очень редко, это узконаправленные разновидности для определенных работ.
Подъемник с в домашних условиях
Порой в быту появляется нужда в поднятии тяжелого груза, но не у всех людей есть возможность подогнать к порогу строительный кран, от чего приходится выкручиваться. И тут на помощь как раз сможет прийти система блоков. Полиспасты, назначение и устройство которых может показаться довольно сложной в конструировании, но при должной подготовки, создание такой конструкции в домашних условиях не составит проблем. Все производится в четыре этапа:
- Расчеты. Они производятся с учетом ваших целей и задач, а именно, параметры рабочего помещение, наличие в нем ограничений, вес груза и расстояние на которое нужно произвести транспортировку. Нужно зафиксировать все эти данный для составления чертежа и выбора конструкции.
 Нужно зафиксировать все эти данный для составления чертежа и выбора конструкции.
Нужно зафиксировать все эти данный для составления чертежа и выбора конструкции.- Создание чертежа. Если в этом деле нет опыта, то лучше обратится к человеку с опытом и инженерным образованием, который сможет сократить время на создание модели на бумаге. Если помощи взять неоткуда, то лучше обратится в интернет и посмотреть рабочие чертежи базовых конструкций. Каждая из типов будет эффективна в определённых условиях, замеры которых вы сделаете ранее.
- Подбор материалов. Подбор стоит начинать уже на первых этапах, а именно отталкиваться от уже имеющих вещей и тех, что можно приобрести. От вашего чертежа и расчетов зависит, какие детали будут нужны и какой материал лучше использовать. Покупайте в силу своего бюджета и с заделом на дальнейшее использование. Сильно экономить не стоит, иначе конструкция может подвести в самый ответственный момент.
- Конструирование. Этот шаг самый простой из всех, потому что здесь нужно лишь соблюдать план и делать на совесть.

При определённой сноровке и подготовленности может получится очень добротная рабочая модель, которая не будет уступать строительным аналогам. Но если задачи не слишком амбициозные, то сильных затрат это не потребует. Для надежности можно в создании использовать уже готовый части из строительных полиспастов.
Заключение
Полиспасты просты в устройстве, но их назначение важно, потому что благодаря им можно изводить сложнейшие грузоподъемные манипуляции. Строительство зданий, проведение линий электрических кабелей, установка фуникулера или спасательная операция, в любой из этих ситуациях надежность исполнения может гарантировать система блоков.
Полиспаст – особенности работы разных видов такой конструкции + видео
Для подъема больших грузов человек не очень силен, но он придумал множество механизмов, которые упрощают этот процесс, и в этой статье мы обсудим полиспасты: назначение и устройство таких систем, а также попытаемся сделать простейший вариант такого приспособления своими руками.
Каким образом мы упрощаем подъем грузов?
Грузовой полиспаст – это система, состоящая из веревок и блоков, благодаря которой можно выиграть в эффективной силе при потере в длине. Принцип довольно прост. В длине мы проигрываем ровно столько, во сколько раз оказался выигрыш в силе. Благодаря этому золотому правилу механики можно поднимать грузы большой массы, не прилагая при этом больших усилий. Что в принципе не так критично. Приведем пример. Вот вы выиграли в силе в 8 раз, при этом вам придется вытянуть веревку длиной в 8 метров, чтобы поднять объект на высоту 1 метр.
Применение таких приспособлений обойдется вам дешевле, чем аренда подъемного крана, к тому же, вы можете сами контролировать выигрыш в силе. У полиспаста есть две разные стороны: одна из них неподвижная, которая крепится на опоре, а другая – подвижная, которая цепляется на самом грузе. Выигрыш в силе происходит благодаря подвижным блокам, которые крепятся на подвижной стороне полиспаста.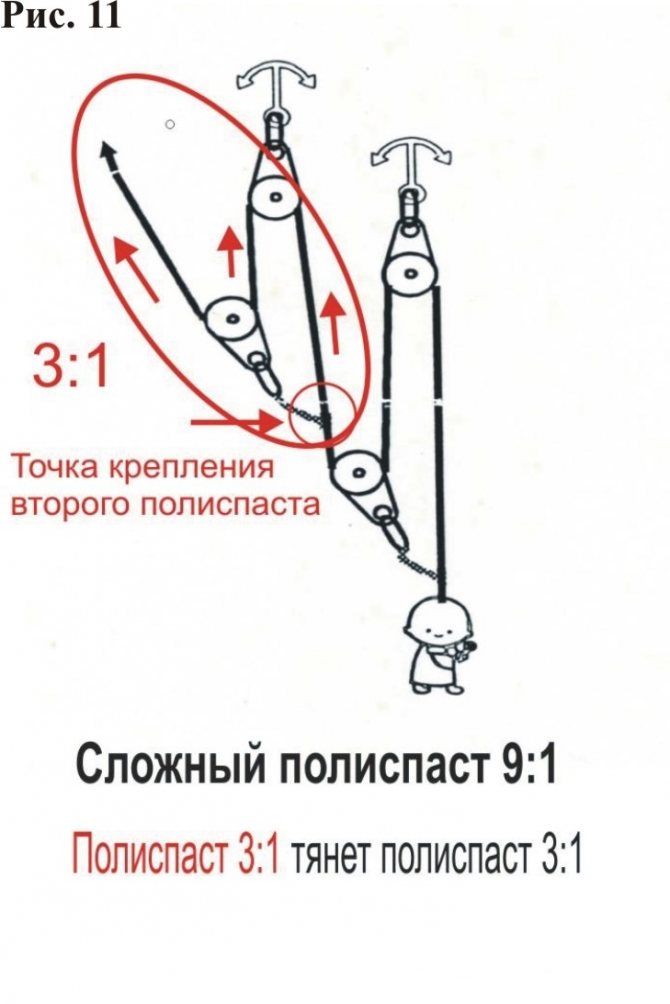 Неподвижная часть служит только для изменения траектории движения самой веревки.
Неподвижная часть служит только для изменения траектории движения самой веревки.
Виды полиспастов выделяют по сложности, четности и кратности. По сложности есть простые и сложные механизмы, а кратность обозначает умножение силы, то есть, если кратность будет равна 4, то теоретически вы выигрываете в силе в 4 раза. Также редко, но все же применяется скоростной полиспаст, такой вид дает выигрыш в скорости перемещения грузов при совсем малой скорости элементов привода.
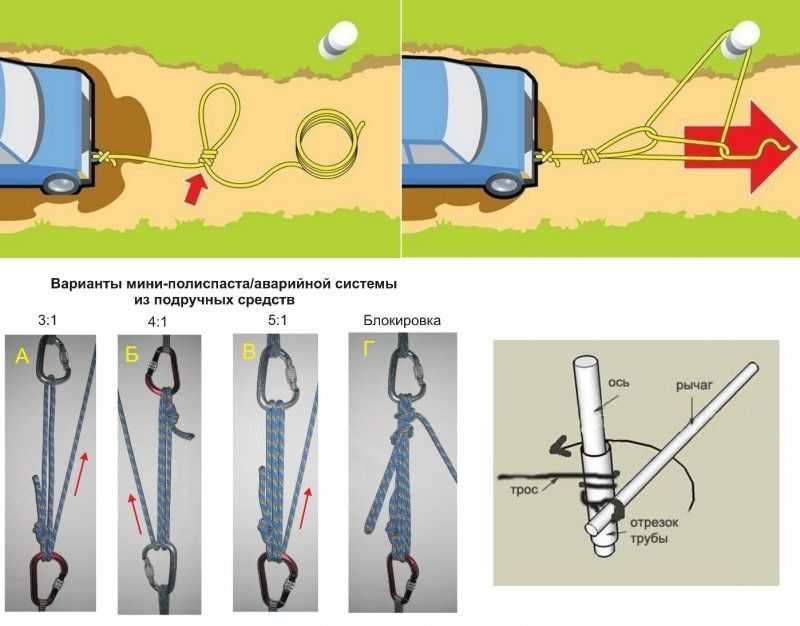
Как работает простая конструкция блоков?
Рассмотрим для начала простой монтажный полиспаст. Его можно получить при добавлении блоков на опору и груз. Чтобы получить нечётный механизм, необходимо закрепить конец верёвки на подвижной точке груза, а чтобы получить чётный, то крепим веревку на опоре. При добавлении блока получаем +2 к силе, а подвижная точка дает +1, соответственно. Например, чтобы получить полиспаст для лебедки с кратностью 2, необходимо закрепить конец верёвки на опоре и использовать один блок, который крепится на грузе. И у нас будет чётный вид приспособления.
Например, чтобы получить полиспаст для лебедки с кратностью 2, необходимо закрепить конец верёвки на опоре и использовать один блок, который крепится на грузе. И у нас будет чётный вид приспособления.
Принцип работы полиспаста с кратностью 3 выглядит по-другому. Здесь конец веревки крепится на грузе, и используются два ролика, один из них мы крепим на опоре, а другой – на грузе. Такой тип механизма дает выигрыш в силе в 3 раза, это нечётный вариант. Чтобы понять, каков выигрыш в силе получится, можно воспользоваться простым правилом: сколько веревок идет от груза, таков наш выигрыш в силе. Используются обычно полиспасты с крюком, на котором, собственно говоря, и крепится груз, ошибочно думать, что это только блок и веревка.
Сложная система блоков – как рассчитать выигрыш в силе?
Теперь узнаем, как работает полиспаст сложного типа. Под этим названием подразумевается механизм, где соединены в одну систему несколько простых вариантов данного грузового устройства, они тянут друг друга. Выигрыш в силе таких конструкций рассчитывается путем перемножения их кратностей. Например, мы тянем один механизм с кратностью 4, а другой с кратностью 2, тогда теоретический выигрыш в силе у нас будет равен 8. Все вышеуказанные расчеты имеют место быть только у идеальных систем, у которых нет силы трения, на практике же дела обстоят иначе.
Выигрыш в силе таких конструкций рассчитывается путем перемножения их кратностей. Например, мы тянем один механизм с кратностью 4, а другой с кратностью 2, тогда теоретический выигрыш в силе у нас будет равен 8. Все вышеуказанные расчеты имеют место быть только у идеальных систем, у которых нет силы трения, на практике же дела обстоят иначе.
В каждом из блоков происходит небольшая потеря в мощности из-за трения, так как она еще тратится как раз на преодоление силы трения. Для того чтобы уменьшить трение, необходимо помнить: чем больше у нас радиус перегиба веревки, тем меньше будет сила трения. Лучше всего использовать ролики с большим радиусом там, где это возможно. При использовании карабинов следует делать блок из одинаковых вариантов, но ролики гораздо эффективнее карабинов, так как на них у нас потеря составляет 5-30 %, а вот на карабинах же до 50 %. Также не лишним будет знать, что наиболее эффективный блок необходимо располагать ближе к грузу для получения максимального эффекта.
Как же нам рассчитать реальный выигрыш в силе? Для этого нам необходимо знать КПД применяемых блоков. КПД выражается числами от 0 до 1, и если мы используем веревку большого диаметра или слишком жесткую, то эффективность от блоков будет значительно ниже, чем указана производителем. А значит, необходимо это учесть и скорректировать КПД блоков. Чтобы рассчитать реальный выигрыш в силе простого типа грузоподъемного механизма, необходимо рассчитать нагрузку на каждую ветвь веревки и сложить их. Для расчета выигрыша в силе сложных типов необходимо перемножить реальные силы простых, из которых он состоит.
Веревка и ее роль в работе полиспаста
Не стоит забывать еще и о трении веревки, так как ветви ее могут перекручиваться между собой, а ролики от больших нагрузок могут сходиться и зажимать веревку. Дабы этого не происходило, следует разнести блоки относительно друг друга, например, можно между ними использовать монтажную плату. Следует также приобретать только статические веревки, не растягивающиеся, так как динамические дают серьёзный проигрыш в силе. Для сбора механизма может использоваться как отдельная, так и грузовая веревка, присоединенная к грузу независимо от подъемного устройства.
Следует также приобретать только статические веревки, не растягивающиеся, так как динамические дают серьёзный проигрыш в силе. Для сбора механизма может использоваться как отдельная, так и грузовая веревка, присоединенная к грузу независимо от подъемного устройства.
Преимущества использования отдельной веревки состоит в том, что вы можете быстро собрать или приготовить заранее грузоподъемную конструкцию. Вы также можете использовать всю ее длину, это также облегчает проход узлов. Из минусов можно упомянуть то, что нет возможности автоматической фиксации поднимаемого груза. Преимущества грузовой веревки в том, что возможна автофиксация поднимаемого объекта, и нет необходимости в отдельной веревке. Из минусов важно то, что при работе сложно проходить узлы, а также приходится затрачивать грузовую веревку на сам механизм.
Поговорим об обратном ходе, который неизбежен, так как он может возникнуть при прихватывании веревки, или же в момент снятия груза, или при остановке на отдых. Чтобы обратного хода не возникало, необходимо использовать блоки, которые пропускают веревку только в одну сторону. При этом организовываем конструкцию так, что блокирующий ролик крепится первым от поднимаемого объекта. Благодаря этому, мы не только избегаем обратного хода, но также позволяем закрепить груз на время разгрузки или же просто перестановки блоков.
Чтобы обратного хода не возникало, необходимо использовать блоки, которые пропускают веревку только в одну сторону. При этом организовываем конструкцию так, что блокирующий ролик крепится первым от поднимаемого объекта. Благодаря этому, мы не только избегаем обратного хода, но также позволяем закрепить груз на время разгрузки или же просто перестановки блоков.
Если вы используете отдельную веревку, то блокирующий ролик крепится последним от поднимаемого груза, при этом фиксирующий ролик должен обладать высокой эффективностью.
Способы крепления веревки к грузоподъемному механизму
Теперь немного о креплении грузоподъемного механизма к грузовой веревке. Редко, когда у нас под рукой находится веревка нужной длины, чтобы закрепить подвижную часть блока. Вот несколько видов крепления механизма. Первый способ – с помощью схватывающих узлов, которые вяжутся из репшнуров диаметром 7-8 мм, в 3-5 оборотов. Данный способ, как показала практика, является наиболее эффективным, так как схватывающий узел из 8 мм шнура на веревке диаметром 11 мм начинает сползать только при нагрузке 10-13 кН. При этом вначале он не деформирует веревку, а спустя какое-то время, оплавляет оплетку и прикипает к ней, начиная играть роль предохранителя.
Данный способ, как показала практика, является наиболее эффективным, так как схватывающий узел из 8 мм шнура на веревке диаметром 11 мм начинает сползать только при нагрузке 10-13 кН. При этом вначале он не деформирует веревку, а спустя какое-то время, оплавляет оплетку и прикипает к ней, начиная играть роль предохранителя.
Другой способ заключается в использовании зажима общего назначения. Время показало, что его можно использовать на обледенелых и мокрых веревках. Он начинает ползти только при нагрузке в 6-7 кН и несильно травмирует веревку. Еще один способ заключается в использовании персонального зажима, но он является не рекомендуемым, так как он начинает ползти при усилии уже в 4 кН и при этом рвет оплетку, или даже может перекусить веревку. Это все промышленные образцы и их применение, мы же попробуем создать самодельный полиспаст.
Создаем простейший подъемный механизм своими руками
А вот если механизм для грузов нужен срочно или на один раз, а выбирать по магазинам его нет времени и жалко денег, мы расскажем, как сделать полиспаст своими руками. Хорошо, если у вас в мастерской имеются резьбовые шпильки, подшипники, блок, трос, крюк, шестеренка. Понадобится немного времени: нужно подшипники насадить на шпильку. Гайку от шпильки желательно зафиксировать, чтобы не тратить некоторую часть сил впустую на прокручивание своеобразного вала. Конец шпильки можно снабдить шестеренкой, сделав таким образом более удобный ручной привод.
Хорошо, если у вас в мастерской имеются резьбовые шпильки, подшипники, блок, трос, крюк, шестеренка. Понадобится немного времени: нужно подшипники насадить на шпильку. Гайку от шпильки желательно зафиксировать, чтобы не тратить некоторую часть сил впустую на прокручивание своеобразного вала. Конец шпильки можно снабдить шестеренкой, сделав таким образом более удобный ручной привод.
Через блок перекидываем трос и крепим его на опоре, а вот на другой конец цепляем крюк, на который будем вешать груз. Также на конце троса можно зафиксировать систему строп, если характер груза не позволит его насадить на крюк. В принципе, самый простейший вариант полиспаста готов. Остается приступить к работе, соблюдая технику безопасности, которая одинакова для всех механизмов, как покупных, так и самодельных. Внимательно проверяйте все элементы на целостность перед работой, а во время работы не делайте резких движений, поднимать груз следует плавно, и, конечно, не стоит стоять под подвешенным грузом.
- Автор: Михаил Малофеев
- Распечатать
Оцените статью:
(9 голосов, среднее: 4.6 из 5)
Поделитесь с друзьями!
Назначение, устройство блоков и полиспаста. Кратность полиспаста. Система полиспастов подъема грузов.
Система подвижных и неподвижных блоков, обвитых одним канатом, называется полиспаст. Неподвижный блок — ось которого не перемещается в пространстве, подвижный – у которого ось вращения перемещается вверх-вниз вместе с грузом.
Полиспаст позволяет уменьшить усилие,
необходимое для подъема груза,
следовательно, использовать более
тонкий канат и менее мощный привод.
Обратная сторона полиспаста – увеличение
времени подъёма груза, т.к. за один оборот
грузового барабана груз поднимется на
меньшее расстояние.
На гидравлических автомобильных кранах применяют полиспасты кратностью от 2 до 12. На кране КС-3577 применяется 5-ти кратная запасовка грузового полиспаста, которую крановщик может самостоятельно уменьшать в зависимости от массы поднимаемого груза.
Подготовить кран к работе, начиная с запуска двигателя.
Запуск двигателя.
Переключить тумблером приборы контроля за двигателем на кабину автокрана.
Тумблером включить коробку отбора мощности, отжимая сцепление.
Выставить выносные опоры с подпятниками на деревянных подкладках
Включить двух ходовой кран для подачи жидкости к гидрораспределителю выносных опор.
Произвести блокировку задней подвески крана.
Опустить штоки гидроцилиндров опор и горизонтировать кран по креномеру
Переключить рычаг двуходового крана в рабочее положение (вправо) для направления потока рабочей жидкости к распределению рабочих операций.
Выключить двух ходовой кран ограничителя затяжки крюка, находящийся в кабине машиниста крана.
Включить приборы безопасности и убедиться и их работе (должна гореть зеленая лампочка ОГБ-3 или ОНК-140)
Освободить крюк.
Навесить стропы, поднять крюк. Кран готов к работе.

Правила установки крана вблизи зданий, котлованов и траншей.
Установка крана должна осуществляться
в соответствии с ППР или технологической
картой, чтоб при работе расстояние между
поворотной частью крана в любом его
положении и строениями; штабелями и
другими предметами было не менее 1м.
Установка вблизи котлованов и траншей осуществляется по таблице и зависит от глубины траншеи и типа грунта. При невозможности соблюдения этих расстояний откос должен быть укреплен. После установки крана лицо, ответственное за БПР, должно записать в вахтенном журнале крановщика: «Установку в указанном мною месте проверил. Работу разрешаю».
Место производства работ по подъему и перемещению грузов в темное время суток должно быть хорошо освещено.
Определить массу трубы диаметром 1420мм, длиной 12м, толщиной стенки 20мм, удельным весом – 7,8т/м3. Билет №11.
Назначение, общее устройство стрелы. Схема запасовки полиспаста механизма подъема стрелы.
Стреловое оборудование обеспечивает действие рабочего органа (крюковой подвески) в рабочей зоне крана. Оно подразделяется на основное и сменное.
Для
крана КС-3577 основное стреловое оборудование
состоит из корневой и выдвижных секций,
а так же гидроцилиндров подъёма и
выдвижения стрелы. Секции представляют
собой стальные сварные конструкции
коробчатого сечения из мелкозернистой
высокопрочной стали. Корневая секция
имеет серьги для крепления к поворотной
части, а с другой стороны – специальную
каретку, по которой движется выдвижная
секция. Она тоже имеет каретку в задней
части, которая скользит внутри корневой
секции, также к торцу выдвижной секции
приварен оголовок с неподвижными блоками
грузового полиспаста.
Секции представляют
собой стальные сварные конструкции
коробчатого сечения из мелкозернистой
высокопрочной стали. Корневая секция
имеет серьги для крепления к поворотной
части, а с другой стороны – специальную
каретку, по которой движется выдвижная
секция. Она тоже имеет каретку в задней
части, которая скользит внутри корневой
секции, также к торцу выдвижной секции
приварен оголовок с неподвижными блоками
грузового полиспаста.
На головке ГЦ подъёма стрелы крана КС-3577 установлен специальный упор, не позволяющий стреле опуститься ниже уровня кабины водителя. Минимальная длина стрелы составляет 8 метров, максимальная – 14 метров.
В состав
сменного стрелового оборудования могут
входить специальные удлинители стрелы:
гусёк и вставка. Они представляют собой
сварную решетчатую металлоконструкцию
из уголков. Устанавливается на осях со
втулками и крепится стальными пальцами
с фиксаторами. Гусек может транспортироваться
на стреле крана. В оголовке гуська на
оси установлен блок. На некоторых моделях
крана для работы с гуськом устанавливается
вспомогательная грузовая лебедка.
Техническое обслуживание стрелового оборудования заключается в регулярной смазке подвижных соединений и кареток консистентной смазкой через пресс масленки.
Браковка стрелового оборудование: наличие трещин, остаточных деформаций, предельный износ вставок и кареток.
Выбор и расчёт полиспаста | Статьи
Главная
Публикации
Выбор и расчёт полиспаста
Сдвоенные полиспасты применяют в двухбалочных мостовых и козловых кранах, у которых грузоподъемный механизм установлен на грузовой тележке, а грузовой канат от крюковой подвески сразу наматывается на барабан, минуя направляющие блоки. Одинарные же полиспасты используют на однобалочных мостовых и козловых кранах грузоподъемностью до 10 т, оборудованных электрической талью, а также на стреловых настенных или на колонне, на большей части башенных, на стреловых самоходных кранах. Важнейшей характеристикой полиспаста является его кратность. Чем больше заданная грузоподъемность крана Q, тем выше должна быть кратность полиспаста а (табл.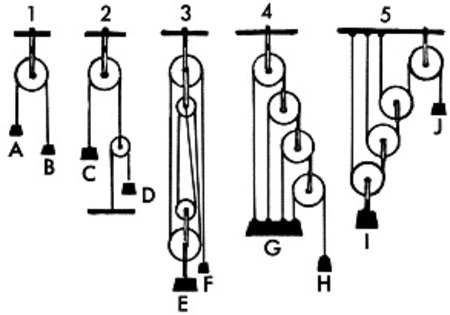 1). Кроме грузоподъемности на выбор кратности полиспаста могут оказать влияние высота и скорость подъема груза. Если задана большая высота подъема груза, то кратность полиспаста приходится ограничивать с тем, чтобы длина грузового каната и, соответственно, барабана остались бы в допустимых пределах. От скорости подъема груза, в свою очередь, зависит передаточное отношение механизма и без ее учета возможны проблемы с подбором стандартного редуктора.
1). Кроме грузоподъемности на выбор кратности полиспаста могут оказать влияние высота и скорость подъема груза. Если задана большая высота подъема груза, то кратность полиспаста приходится ограничивать с тем, чтобы длина грузового каната и, соответственно, барабана остались бы в допустимых пределах. От скорости подъема груза, в свою очередь, зависит передаточное отношение механизма и без ее учета возможны проблемы с подбором стандартного редуктора.
Таблица 1. Рекомендуемые значения кратности полиспаста
| Характер навивки каната на барабан | Тип поли спаста | Грузоподъёмность крана Q, т | ||||||
|
до 1,0 |
2-6 | 1015 | 2030 | 4050 | 100 125 | более 160 | ||
| Непосредственно (мостовые и козловые краны) | Сдвоен ный | 1 | 1-2 | 3 | 3 | 5 | 6 | 8 |
| Одинар ный | 1-2 | 2 | 4 | 5 | — | - | - | |
| Через направляющие блоки (башенные и другие стреловые краны) | Сдвоен ный | 1-2 | 2 | 3-4 | 5 | 7-8 | 9-10 | 10-12 |
| Одинар ный | - | 1-2 | 3 | - | - | - | - | |
Но все таки основными критериями выбора полиспаста яв¬ляются грузоподъемность Q (табл. 1) и максимальное усилие Sб, которое будет действовать при подъеме груза в набегающем на барабан канате (табл.2). Рекомендуемые в таблицах значения кратности полиспаста и усилия не являются обязательными, поэтому их следует воспринимать как ориентировочные.
1) и максимальное усилие Sб, которое будет действовать при подъеме груза в набегающем на барабан канате (табл.2). Рекомендуемые в таблицах значения кратности полиспаста и усилия не являются обязательными, поэтому их следует воспринимать как ориентировочные.
Подобрав полиспаст, следует начертить его схему в развернутом виде, подобную изображенным на рис.1, и затем приступить к расчету усилия в канате Sб.
Рис.1. Схемы полиспастов
Таблица 2
| Грузоподъёмность крана, Q | Рекомендуемые значения усилия S6 , кН |
| <1,0 | 5-10 |
| 2-6 | 10-30 |
| 10-15 | 30-50 |
| 20-40 | 40-70 |
| >40 | 80-100 |
Для одинарного полиспаста максимальное значение усилия Sб определяют по формуле:
, где G вес поднимаемого груза, включая грузозахватное устройство, кН;
G = Qg
Q - масса груза вместе с грузозахватным устройством, т;
g - ускорение свободного падения, м/с2;
ηδ -КПД канатных блоков, равный при подшипниках скольжения 0,97 и при подшипниках качения 0,98. При наличии в схеме направляющих блоков:
При наличии в схеме направляющих блоков:
где η — число направляющих блоков. Когда груз поднимают сдвоенным или счетверенным полиспастом, то формула принимает следующий вид:
где m - число полиспастов. Если расчетное значение Sб не превышает рекомендуемую для заданной грузоподъемности величину (таб.2), то полиспаст выбран правильно.
Литература:
- Федеральный закон от 21.07.1997 N 116ФЗ (ред. от 13.07.2015) «О промышленной безопасности опасных производственных объектов».
- Строительные краны и грузоподъемные механизмы. Справочник. А.Д.Кирнев, Г.В.Несветаев.
- ФНП «Правила безопасности опасных производственных объектов, на которых используются подъемные сооружения» Приказ от 12 ноября 2013 года N 533.
Проведение экспертизы грузоподъемных кранов и механизмов за 15 дней
К списку статей
Наши работы
Все проекты
простая машина | Определение, типы, примеры, список и факты
простые машины
Просмотреть все СМИ
- Похожие темы:
- винт колесо и ось рычаг шкив наклонная плоскость
См. весь соответствующий контент →
весь соответствующий контент →
простая машина , любое из нескольких устройств с небольшим количеством движущихся частей или без них, которые используются для изменения движения и величины силы для выполнения работы. Это самые простые известные механизмы, которые могут использовать рычаг (или механическое преимущество) для увеличения силы. К простым машинам относятся наклонная плоскость, рычаг, клин, колесо и ось, шкив и винт.
Наклонная плоскость состоит из наклонной поверхности; он используется для подъема тяжелых тел. Самолет предлагает механическое преимущество в том, что сила, необходимая для перемещения объекта вверх по склону, меньше, чем поднимаемый вес (без учета трения). Чем круче уклон или наклон, тем ближе требуемая сила приближается к фактическому весу. Выражаясь математически, сила F , необходимая для перемещения бруска D вверх по наклонной плоскости без трения, равна его весу W В раз больше синуса угла наклонной плоскости с горизонтом (θ).-600x750.jpeg) Уравнение: F = Вт sin θ.
Уравнение: F = Вт sin θ.
Принцип наклонной плоскости широко используется, например, в пандусах и обратных дорогах, где небольшая сила, действующая на расстоянии вдоль склона, может выполнять большую работу.
Рычаг представляет собой брусок или доску, опирающуюся на опору, называемую точкой опоры. Направленная вниз сила, действующая на один конец рычага, может быть передана и увеличена в направлении вверх на другом конце, позволяя небольшой силе поднять тяжелый вес.
Britannica Quiz
Машиностроение и производство
От сверления отверстий и перевозки грузов до автомобильных двигателей и их производства — поработайте над этими вопросами и проверьте свои знания в области машиностроения и производства в этой викторине.
Все ранние люди использовали рычаг в той или иной форме, например, для перемещения тяжелых камней или в качестве палки-копалки для обработки земли. Принцип рычага использовался в свапе, или шадуфе, длинном рычаге, поворачивающемся на одном конце, с платформой или емкостью для воды, свисающими с короткого плеча, и противовесами, прикрепленными к длинному плечу. Человек мог поднять вес, в несколько раз превышающий его собственный, потянув за длинную руку. Говорят, что это устройство использовалось в Египте и Индии для подъема воды и подъема солдат через зубчатые стены еще в 1500 году до нашей эры.
Человек мог поднять вес, в несколько раз превышающий его собственный, потянув за длинную руку. Говорят, что это устройство использовалось в Египте и Индии для подъема воды и подъема солдат через зубчатые стены еще в 1500 году до нашей эры.
Клин — это предмет, сужающийся к тонкому краю. Толкание клина в одном направлении создает силу в боковом направлении. Обычно он делается из металла или дерева и используется для расщепления, подъема или затягивания, например, для закрепления головки молотка на рукоятке.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас
Клин использовался в доисторические времена для раскалывания бревен и камней; топор тоже клин, как зубья на пиле. С точки зрения его механической функции винт можно рассматривать как клин, обернутый вокруг цилиндра.
Колесо и ось состоят из круглой рамы (колеса), которая вращается на валу или стержне (ось). В своей самой ранней форме он, вероятно, использовался для подъема тяжестей или ведер с водой из колодцев.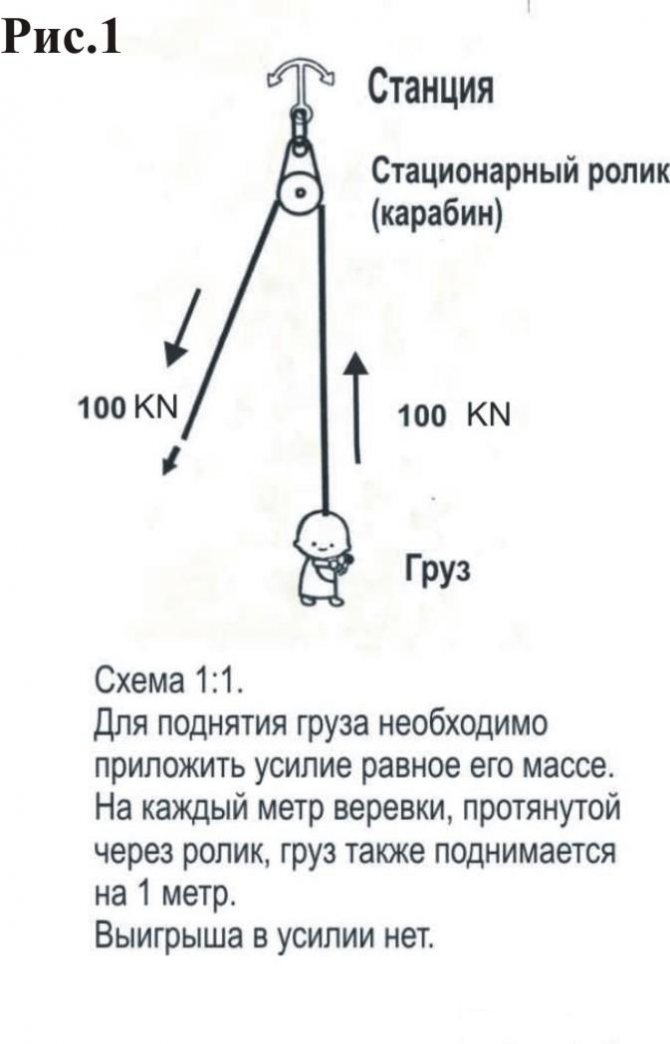
Принцип действия лучше всего объяснить на примере устройства с большой и малой шестернями, прикрепленными к одному и тому же валу. Тенденция силы F , приложенной на радиусе R к большой шестерне, чтобы повернуть вал, достаточна для преодоления большей силы W на радиусе r на малой шестерне. Увеличение силы, или механическое преимущество, равно отношению двух сил ( W : F ), а также равно отношению радиусов двух шестерен ( R : r ).
Если большие и малые шестерни заменить барабанами большого и малого диаметра, обмотанными веревками, колесо и ось смогут поднимать вес. Поднимаемый груз прикрепляется к веревке на маленьком барабане, а оператор тянет веревку на большом барабане. В этом устройстве механическое преимущество равно радиусу большого барабана, деленному на радиус малого барабана. Увеличение механического преимущества может быть получено за счет использования небольшого барабана с двумя радиусами, r 1 и r 2 и шкив.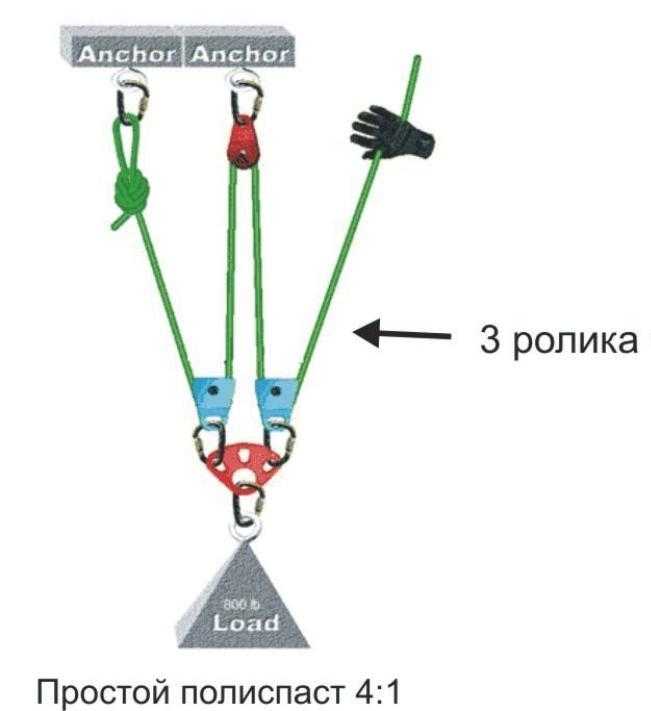 Когда к большому барабану прикладывается сила, канат на маленьком барабане наматывается на D и сходит с d.
Когда к большому барабану прикладывается сила, канат на маленьком барабане наматывается на D и сходит с d.
Мерой усиления силы, обеспечиваемой системой шкив-и-канат, является отношение скорости или отношение скорости, с которой сила приложена к канату ( V F ), к скорости при котором поднимается вес ( В Вт ). Это отношение равно удвоенному радиусу большого барабана, деленному на разность радиусов меньших барабанов D и d. Математически выражается, уравнение составляет V F / V W = 2 R / ( R 2 — R 11112). Фактическое механическое преимущество W / F меньше, чем это отношение скоростей, в зависимости от трения. При таком расположении можно получить очень большое механическое преимущество, сделав два меньших барабана D и d почти одинакового радиуса.
Простые машины: системы шкивов и их рабочий механизм
Шкивы относятся к типу простых машин, состоящих из колеса с канавками и троса или троса. Эти устройства помогают нам эффективно поднимать тяжелые грузы, а также подвешивать в воздухе различные предметы (например, флаг). Прочитайте эту статью ScienceStruck, чтобы узнать больше о различных типах систем шкивов и их рабочих механизмах.
Эти устройства помогают нам эффективно поднимать тяжелые грузы, а также подвешивать в воздухе различные предметы (например, флаг). Прочитайте эту статью ScienceStruck, чтобы узнать больше о различных типах систем шкивов и их рабочих механизмах.
Краткий факт
Согласно легенде, система блок-талей и связанные с ней механизмы были изобретены Архимедом в Сиракузах около 250 г. до н.э. Говорят, что он перемещал военный корабль, полный солдат, с помощью такой подвижной системы шкивов в древней Месопотамии.
Простая машина — это механическое устройство, которое облегчает нам подъем или перемещение груза путем изменения направления или увеличения величины силы, прикладываемой к грузу. Такое устройство использует одну приложенную силу, с помощью которой совершается работа против одной нагрузки. Несколько простых механизмов при соединении образуют сложную машину, которая еще больше снижает усилия, необходимые для «работы» с грузом (например, для подъема тяжелых предметов с помощью крана). Такие устройства существуют не только в механическом виде, но и являются частью тела человека и других животных (например: наши конечности действуют как рычаги). В нашей повседневной жизни мы используем эти простые устройства, не осознавая этого. Следующие параграфы заставят вас понять концепцию важного типа этих машин, который называется шкивом.
Такие устройства существуют не только в механическом виде, но и являются частью тела человека и других животных (например: наши конечности действуют как рычаги). В нашей повседневной жизни мы используем эти простые устройства, не осознавая этого. Следующие параграфы заставят вас понять концепцию важного типа этих машин, который называется шкивом.
Пояснение
Шкив представляет собой простой механизм, состоящий из колеса с канавкой, проходящей по его окружности между ободами колеса. Через канавку проходит канат или трос, который одним концом крепится к грузу, а на другом конце прикладывается усилие для выполнения работы. Эти системы эффективно снижают усилие, которое должен прилагать человек, поднимающий вес. Многие современные шкивы теперь работают от электричества.
Допустим, вам нужно поднять груз массой 100 кг с помощью полиспаста 1 класса. В этом случае усилие, приложенное к одному концу веревки, эквивалентно усилию, необходимому для подъема 100 кг. В случае системы шкивов класса 2 вес делится поровну между минимум двумя ветвями, и, следовательно, прилагаемое усилие эквивалентно силе, необходимой для выполнения работы по подъему груза массой 50 кг.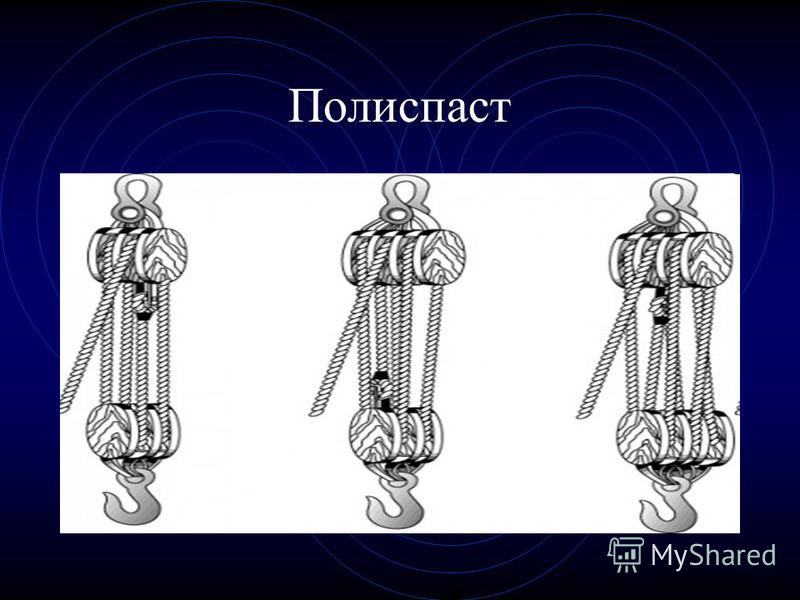
Принцип работы
Система шкивов работает на основе передачи уменьшения веса груза, которое испытывает человек, прилагающий усилие. Груз привязан на одном конце веревки или троса, обладающего сопротивлением, а другой конец характеризуется наличием усилия . Современные системы шкивов представляют собой более или менее сложные машины в сочетании с колесом, шкивом и другими простыми машинными системами.
Фактическое механическое преимущество (AMA) определяется как отношение выходной силы к входной силе, действующей на шкивы. Это рассчитывается в условиях, когда сопротивление, создаваемое трением, действует на всю систему. Этот тип преимущества представлен как:
ААД = Сила нагрузки/сила усилия
Теперь отношение этих сил прямо пропорционально расстоянию, пройденному грузом, и усилию на конце каната соответственно. Кроме того, нагрузка поровну распределяется между различными ветвями каната, а усилие равно натяжению всей канатной или тросовой части системы.
Таким образом, нагрузку и усилие можно представить в виде:
Нагрузка (L) = nT,
Усилие (E) = T
, где «n» обозначает количество прядей каната, а «T» представляет силы натяжения.
В приведенном выше уравнении силы трения действуют на рабочий механизм, и, следовательно, можно рассчитать идеальное механическое преимущество (IMA). IMA определяется как отношение числа прядей или частей каната к силам натяжения, действующим на канат. Этот тип преимущества представлен как:
IMA = nT/T = n (количество прядей или частей каната)
Таким образом, идеальное механическое преимущество равно количеству прядей каната только в случае подвижных и составных систем шкивов.
Если увеличить количество шкивов, усилие, которое необходимо приложить, уменьшится. В зависимости от количества используемых шкивов, количества петель каната или троса и связанного с этим снижения усилия, прилагаемого человеком, шкивы в основном подразделяются на три типа, которые описаны в следующих разделах.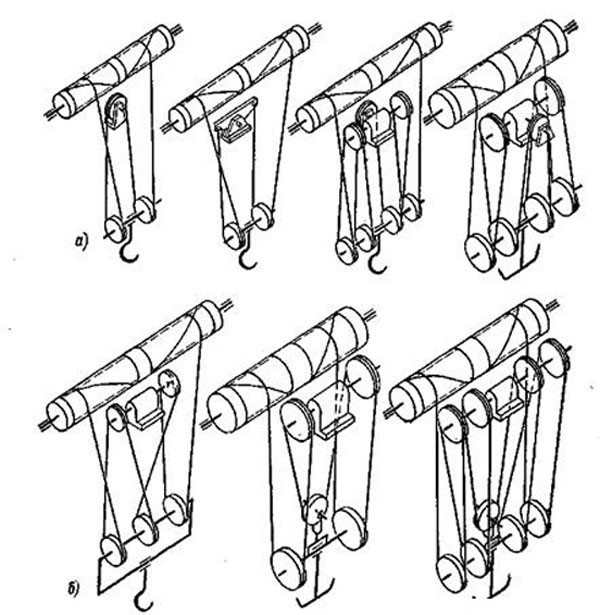
Типы систем шкивов
Фиксированная система шкивов класса 1
В этой конструкции ось шкива фиксируется в одном месте, а груз привязан к другому концу каната. На другом конце прикладывается сила или усилие, чтобы поднять груз. Неподвижный шкив только изменяет направление силы, приложенной для выполнения работы над грузом. Механическое преимущество в этой системе равно 1, что означает, что сила, приложенная к одному концу веревки, такая же, как и сила, приложенная к грузу для его подъема.
Система подвижных шкивов/класса 2
В этом типе ось шкива может свободно перемещаться в пространстве. В то время как один конец груза прикреплен к какому-либо неподвижному объекту, к другому концу прилагается сила. Следовательно, из-за приложения усилия груз поднимается или смещается, когда шкив катится по длине каната. Механическое преимущество подвижного шкива равно 2, что означает, что сила, приложенная к свободному концу шкива, удваивает силу, действующую на груз.
Составная система шкивов
Этот тип состоит из комбинации стационарных и подвижных систем. Составной шкив имеет механическое преимущество больше 2. Хорошим примером является система Block and Tackle . Блок относится к корпусу, который содержит шкивы рядом, а также удерживает ось на месте. Снасть — это веревка, которая используется с этими шкивами для подъема грузов. В этой системе механическое преимущество больше 2. Проиллюстрирован еще один пример этого типа, в котором между неподвижным и подвижным шкивами добавлен третий шкив. Это помогает уменьшить усилие, необходимое для подъема груза.
Применение и примеры
В наше время система шкивов используется для подъема грузов на значительную высоту. Составные шкивы используются кранами для подъема грузов. Простой шкив используется на флагштоке для подъема флага, тогда как блочные и талевые машины используются на кораблях для подъема тяжелых парусов. Иногда одна система блоков и талей соединяется с другой, чтобы увеличить механическое преимущество с помощью коллекторов. Эта система шкивов также используется в основном, когда необходимо поднимать тяжелые грузы; например: на верфях и доках, больших кораблях, промышленном оборудовании и т. д. Другими примерами использования таких простых машин являются жалюзи, регулируемые бельевые веревки и удочки.
Эта система шкивов также используется в основном, когда необходимо поднимать тяжелые грузы; например: на верфях и доках, больших кораблях, промышленном оборудовании и т. д. Другими примерами использования таких простых машин являются жалюзи, регулируемые бельевые веревки и удочки.
Древние люди перебрасывали лианы через ветки деревьев, чтобы поднимать тяжести. Нам нетрудно вообразить сценарий. Шкивы были модифицированы, и новые технологии, связанные с ними, все еще разрабатываются, чтобы помочь нам поднимать более тяжелые грузы. Изобретение простых машин в древние времена является основной причиной масштабной промышленной революции, которая произошла несколько столетий назад, когда различные виды таких устройств были эффективно объединены для разработки новых машин.
Использование простой системы веревочного блока, которая механически соединяет руки, ноги и беговую дорожку, снижает метаболические затраты при ходьбе | Журнал нейроинженерии и реабилитации
- Исследования
- Открытый доступ
- Опубликовано:
- Дейзи Вега
ORCID: orcid. org/0000-0003-0368-7891 1 и
- Кристофер Дж. Арельяно ORCID: orcid.org/0000-0001-9672-3497 1
 org/0000-0003-0368-7891 1 и
org/0000-0003-0368-7891 1 иЖурнал нейроинженерии и реабилитации том 18 , Номер статьи: 96 (2021) Процитировать эту статью
2375 доступов
2 Цитаты
13 Альтметрический
Сведения о показателях
Abstract
История вопроса
Активное использование рук и их координация с шагающими движениями ног может способствовать восстановлению ходьбы у пациентов с нарушением функции нижних конечностей. Тем не менее, в большинстве подходов используются сидячие устройства, позволяющие совершать совместные движения рук и ног. Чтобы предоставить возможность во время ходьбы на беговой дорожке, мы разработали систему канатно-шкивной системы, которая физически связывает руки и ноги. Эта система шкивов рука-нога была заземлена на полу и изготовлена из имеющихся в продаже трубок квадратного сечения с прорезями, сплошных распорных каналов и шкивов с низким коэффициентом трения, что позволило нам использовать веревку для соединения запястья субъекта с ипсилатеральной ступней. Эта установка была основана на нашей идее о том, что во время ходьбы рука может генерировать вспомогательную силу во время отвода руки и, следовательно, помогать при движении ногой.
Тем не менее, в большинстве подходов используются сидячие устройства, позволяющие совершать совместные движения рук и ног. Чтобы предоставить возможность во время ходьбы на беговой дорожке, мы разработали систему канатно-шкивной системы, которая физически связывает руки и ноги. Эта система шкивов рука-нога была заземлена на полу и изготовлена из имеющихся в продаже трубок квадратного сечения с прорезями, сплошных распорных каналов и шкивов с низким коэффициентом трения, что позволило нам использовать веревку для соединения запястья субъекта с ипсилатеральной ступней. Эта установка была основана на нашей идее о том, что во время ходьбы рука может генерировать вспомогательную силу во время отвода руки и, следовательно, помогать при движении ногой.
Методы
Чтобы проверить эту идею, мы сравнили механические, мышечные и метаболические эффекты при обычной ходьбе и ходьбе с использованием системы блоков «рука-нога». Мы измерили силы реакции веревки и опоры, электромиографические сигналы ключевых мышц рук и ног, а также показатели потребления метаболической энергии, когда здоровые молодые люди шли со скоростью 1,25 м/с на двухленточной беговой дорожке (n = 8).
Результаты
Мы обнаружили, что с помощью нашей системы блоков «рука-нога» можно создавать вспомогательную силу, достигающую пиковых значений в среднем в 7% от массы тела. Вопреки нашим ожиданиям, сила в основном совпадала с пропульсивной фазой ходьбы, а не с махом ногой. Наши результаты показывают, что испытуемые активно использовали свои руки, чтобы использовать энергию движущегося полотна беговой дорожки, что помогало приводить в движение все тело с помощью веревочной связи рука-нога. Это эффективно уменьшило мышечную и механическую нагрузку на ноги, уменьшив импульс движения на 43% (9).0250 p < 0,001), что привело к чистому снижению метаболической мощности, необходимой для ходьбы, на 17% ( p = 0,001).
Выводы
Эти результаты обеспечивают биомеханическую и энергетическую основу для того, как мы могли бы переосмыслить использование рук в реабилитации ходьбы, открывая возможность изучить, может ли такой метод помочь пациентам восстановить способность ходить.
Регистрация исследования: Исследование зарегистрировано 29 сентября 2018 г. на сайте ClinicalTrials.gov (ID — NCT03689).647).
Исходная информация
Механические и нервные преимущества, связанные с естественной координацией рук и ног во время ходьбы, вдохновили ученых и практиков на то, чтобы подчеркнуть это естественное поведение во время реабилитации ходьбы [1,2,3,4,5,6,7 ,8,9]. Например, Behrman и Harkema [2] были первыми, кто использовал преимущество координации маховых движений рук с шагающими движениями ног во время тренировки на беговой дорожке с поддержкой веса тела [1, 2]. В серии тематических исследований физиотерапевты инструктировали пациентов намеренно размахивать руками или облегчать движение рук с помощью ручных палок [2]. В качестве альтернативы лежачий степпер или велоэргометр могут позволить человеку активно координировать движения рук и ног, оставаясь в сидячем положении. В отличие от пассивного движения руки, которому способствуют ручные палки, эти устройства имеют дополнительное преимущество, позволяя пациенту контролировать ситуацию. Благодаря этому процессу люди могут использовать свои руки, чтобы модулировать объем и время помощи, которые помогают управлять движением их ног, тем самым активно участвуя в переобучении своей походке. Эксперименты, изучающие тренировочные эффекты активной координации рук и ног с помощью этих устройств, показали функциональные улучшения при ходьбе у лиц с неполным повреждением спинного мозга [10] или хроническим инсультом [11, 12]. Улучшения, наблюдаемые при ходьбе в положении лежа и езде на велосипеде, могли быть результатом использования нейронной связи, которая лежит в основе скоординированного движения рук и ног [2,3,4].
Благодаря этому процессу люди могут использовать свои руки, чтобы модулировать объем и время помощи, которые помогают управлять движением их ног, тем самым активно участвуя в переобучении своей походке. Эксперименты, изучающие тренировочные эффекты активной координации рук и ног с помощью этих устройств, показали функциональные улучшения при ходьбе у лиц с неполным повреждением спинного мозга [10] или хроническим инсультом [11, 12]. Улучшения, наблюдаемые при ходьбе в положении лежа и езде на велосипеде, могли быть результатом использования нейронной связи, которая лежит в основе скоординированного движения рук и ног [2,3,4].
Несмотря на то, что ходьба в положении лежа и езда на велосипеде продемонстрировали преимущества, серьезное беспокойство вызывает то, что этому типу активности не хватает некоторой специфичности задач, связанных с походкой [13]. Например, кинематика тазобедренных, коленных, локтевых и плечевых суставов при ходьбе и езде на велосипеде в положении лежа принципиально отличается от ходьбы [5, 13]. Кроме того, эти устройства не позволяют нижним конечностям подвергаться постоянной нагрузке и разгрузке, как это происходит во время тренировки на беговой дорожке с поддержкой веса тела. Акт ритмичной нагрузки и разгрузки ног признан важным сенсорным сигналом для содействия восстановлению ходьбы во время реабилитации походки [14, 15]. Чтобы способствовать восстановлению ходьбы, тренировочное задание должно иметь те же сенсорные сигналы, что и целевое задание [2, 16]. Таким образом, разработка стратегии, при которой человек может одновременно извлечь выгоду из активной координации рук и ног (как это делается при ходьбе в положении лежа и на велосипеде) и ритмичной нагрузки и разгрузки ноги во время ходьбы на беговой дорожке, может еще больше оптимизировать специфичность задачи и улучшить восстановление при ходьбе. Тем не менее, подход, который позволяет человеку активно использовать руки для управления движением ног во время ходьбы на беговой дорожке, остается неуловимым.
Кроме того, эти устройства не позволяют нижним конечностям подвергаться постоянной нагрузке и разгрузке, как это происходит во время тренировки на беговой дорожке с поддержкой веса тела. Акт ритмичной нагрузки и разгрузки ног признан важным сенсорным сигналом для содействия восстановлению ходьбы во время реабилитации походки [14, 15]. Чтобы способствовать восстановлению ходьбы, тренировочное задание должно иметь те же сенсорные сигналы, что и целевое задание [2, 16]. Таким образом, разработка стратегии, при которой человек может одновременно извлечь выгоду из активной координации рук и ног (как это делается при ходьбе в положении лежа и на велосипеде) и ритмичной нагрузки и разгрузки ноги во время ходьбы на беговой дорожке, может еще больше оптимизировать специфичность задачи и улучшить восстановление при ходьбе. Тем не менее, подход, который позволяет человеку активно использовать руки для управления движением ног во время ходьбы на беговой дорожке, остается неуловимым.
Чтобы реализовать эту идею, мы разработали систему веревочного блока, которая физически связывает ипсилатеральную руку и ногу во время ходьбы на беговой дорожке (рис. 1). Мы предполагали, что при таком подходе люди смогут использовать руки для помощи ногам, что позволит им более активно участвовать в повторной тренировке походки. Такой подход потребует большей нагрузки на руки, но мы подозревали, что это снизит нагрузку на ноги. Поэтому мы решили проверить концепцию, сначала поняв, как наш метод соединения рук и ног повлияет на механические, мышечные и метаболические потребности при ходьбе в когорте здоровых людей без неврологических нарушений. Мы предположили, что пользователь может тянуть за веревку, когда рука откидывается назад, и, таким образом, создавать силу вдоль веревки, помогающую маху ипсилатеральной ногой. Мы пришли к выводу, что увеличение мышечной потребности рук повлечет за собой метаболические затраты; однако, если вспомогательная сила эффективно передается вдоль веревки, мы ожидали, что эта вспомогательная сила уменьшит мышечную и метаболическую потребность в повороте ноги, которая, по оценкам, составляет от 10 до 33% чистых метаболических затрат при ходьбе [17, 18,19].
1). Мы предполагали, что при таком подходе люди смогут использовать руки для помощи ногам, что позволит им более активно участвовать в повторной тренировке походки. Такой подход потребует большей нагрузки на руки, но мы подозревали, что это снизит нагрузку на ноги. Поэтому мы решили проверить концепцию, сначала поняв, как наш метод соединения рук и ног повлияет на механические, мышечные и метаболические потребности при ходьбе в когорте здоровых людей без неврологических нарушений. Мы предположили, что пользователь может тянуть за веревку, когда рука откидывается назад, и, таким образом, создавать силу вдоль веревки, помогающую маху ипсилатеральной ногой. Мы пришли к выводу, что увеличение мышечной потребности рук повлечет за собой метаболические затраты; однако, если вспомогательная сила эффективно передается вдоль веревки, мы ожидали, что эта вспомогательная сила уменьшит мышечную и метаболическую потребность в повороте ноги, которая, по оценкам, составляет от 10 до 33% чистых метаболических затрат при ходьбе [17, 18,19]. Принимая во внимание нашу логику, мы предположили, что (1) ходьба с использованием системы блоков «рука-нога» увеличит мышечную потребность руки для создания вспомогательной силы, но компромиссом будет снижение мышечной потребности ноги для поворота ноги, и (2) любые метаболические затраты, связанные с активным использованием рук, будут уравновешены снижением затрат на размахивание ногами, что не приведет к изменению чистых метаболических затрат при ходьбе. Проверка нашей первой гипотезы предоставила бы доказательство того, что во время ходьбы на беговой дорожке можно активно использовать руки для движения ног. Проверка нашей второй гипотезы даст представление о том, достигается ли этот подход за счет увеличения метаболических затрат или нет. Наша общая цель в этом исследовании — обеспечить фундаментальное понимание того, как физическое соединение рук и ног влияет на биомеханику и энергетику ходьбы. Мы считаем, что это фундаментальное понимание даст представление о его потенциальном использовании в качестве стратегии реабилитации для людей с нарушением функции нижних конечностей, например, тех, кто восстанавливается после травмы спинного мозга или инсульта.
Принимая во внимание нашу логику, мы предположили, что (1) ходьба с использованием системы блоков «рука-нога» увеличит мышечную потребность руки для создания вспомогательной силы, но компромиссом будет снижение мышечной потребности ноги для поворота ноги, и (2) любые метаболические затраты, связанные с активным использованием рук, будут уравновешены снижением затрат на размахивание ногами, что не приведет к изменению чистых метаболических затрат при ходьбе. Проверка нашей первой гипотезы предоставила бы доказательство того, что во время ходьбы на беговой дорожке можно активно использовать руки для движения ног. Проверка нашей второй гипотезы даст представление о том, достигается ли этот подход за счет увеличения метаболических затрат или нет. Наша общая цель в этом исследовании — обеспечить фундаментальное понимание того, как физическое соединение рук и ног влияет на биомеханику и энергетику ходьбы. Мы считаем, что это фундаментальное понимание даст представление о его потенциальном использовании в качестве стратегии реабилитации для людей с нарушением функции нижних конечностей, например, тех, кто восстанавливается после травмы спинного мозга или инсульта.
Система канатных шкивов рука-нога. Субъекты ходили по беговой дорожке для измерения силы с разделенным ремнем, прикрепленной к простому устройству, которое соединяет ипсилатеральную руку и ногу с помощью веревки. Горизонтальные шкивы регулируются по высоте, что позволяет относительно изменять длину каната. Кроме того, тензодатчик включен последовательно с веревкой и используется для измерения натяжения веревки во время ходьбы на беговой дорожке. Обратите внимание, что отражающие маркеры были прикреплены к обеим сторонам, в то время как датчики ЭМГ были размещены только на правой стороне тела из-за ограниченного количества датчиков, доступных в нашей лаборатории
Полноразмерное изображение
Методы
Участники
Восемь здоровых, молодые субъекты приняли участие в этом исследовании (3 женщины и 5 мужчин; возраст = 23,25 ± 3,37 года, масса = 73,88 ± 18,46 кг, рост = 173,84 ± 13,95 см; среднее ± SD). Перед экспериментальным сеансом было проведено телефонное интервью, чтобы убедиться, что участники соответствуют критериям включения здорового участника, то есть физически активны, не курят, имеют индекс массы тела < 30,0 кг/м 2 и не имеют скелетно-мышечных травм. . Затем в день экспериментального сеанса испытуемый заполнял, просматривал и подписывал форму проверки состояния здоровья. Кроме того, они прочитали и подписали документ об информированном согласии. Это исследование было рассмотрено и одобрено Институциональным наблюдательным советом Хьюстонского университета.
. Затем в день экспериментального сеанса испытуемый заполнял, просматривал и подписывал форму проверки состояния здоровья. Кроме того, они прочитали и подписали документ об информированном согласии. Это исследование было рассмотрено и одобрено Институциональным наблюдательным советом Хьюстонского университета.
Размер выборки
Размер нашей выборки был основан на исследовании Gottschall и Kram [17], где они использовали внешний вспомогательный аппарат для маха ногой для количественной оценки стоимости маха ногой во время ходьбы человека ( n = 10). Таким образом, мы решили получить размер выборки из 10 субъектов. Однако мы были ограничены 8 испытуемыми из-за неисправности миниатюрных тензодатчиков, размещенных на запястьях, которые нельзя было легко заменить в разумные сроки.
Описание системы канатных шкивов рука-нога
Мы изготовили на заказ канатно-шкивное устройство шириной 39 дюймов (ширина) × 39 дюймов (длина) × 72 дюйма (высота) с использованием квадратных труб с прорезями и сплошных стоечных каналов (рис. 1). Два регулируемых по высоте стержня охватывали устройство по горизонтали (верхний и нижний шкив), каждый из которых состоял из двух шкивов с низким коэффициентом трения. Нейлоновая веревка с алмазным плетением (диаметром 3/16″; узлы SGT) проходила через пару шкивов, то есть одна веревка проходила через два левых шкива, а другая веревка проходила через два правых шкива. Каждая веревка была соединена с запястьем субъекта через запястье на одном конце. На другом конце веревка соединялась со ступней испытуемого шнурками и крепилась с помощью прочных кабельных стяжек. Сверхминиатюрный тензодатчик (модель: LCM201-500; Omega Engineering, Стэмфорд, Коннектикут, США) был помещен последовательно с каждой веревкой и бинтом для запястья с правой и левой стороны для измерения тяговых усилий, создаваемых каждой рукой во время ходьбы. Наше обоснование для реализации этой установки было основано на нашей идее, что рука будет генерировать вспомогательную силу во время ретракции руки. Учитывая, что максимальное втягивание правой руки соответствует удару правой пяткой [20], мы хотели позволить руке обеспечить вспомогательную силу через веревку для поворота ипсилатеральной ноги вперед.
1). Два регулируемых по высоте стержня охватывали устройство по горизонтали (верхний и нижний шкив), каждый из которых состоял из двух шкивов с низким коэффициентом трения. Нейлоновая веревка с алмазным плетением (диаметром 3/16″; узлы SGT) проходила через пару шкивов, то есть одна веревка проходила через два левых шкива, а другая веревка проходила через два правых шкива. Каждая веревка была соединена с запястьем субъекта через запястье на одном конце. На другом конце веревка соединялась со ступней испытуемого шнурками и крепилась с помощью прочных кабельных стяжек. Сверхминиатюрный тензодатчик (модель: LCM201-500; Omega Engineering, Стэмфорд, Коннектикут, США) был помещен последовательно с каждой веревкой и бинтом для запястья с правой и левой стороны для измерения тяговых усилий, создаваемых каждой рукой во время ходьбы. Наше обоснование для реализации этой установки было основано на нашей идее, что рука будет генерировать вспомогательную силу во время ретракции руки. Учитывая, что максимальное втягивание правой руки соответствует удару правой пяткой [20], мы хотели позволить руке обеспечить вспомогательную силу через веревку для поворота ипсилатеральной ноги вперед.
Протокол устройства
В ходе пилотного тестирования мы разработали стандартный протокол для подключения устройства к каждому субъекту (см. Дополнительный файл 1). Основная цель нашего стандартного протокола состояла в том, чтобы свести к минимуму любое провисание веревки, чтобы любое тянущее усилие, создаваемое рукой, максимально естественно тянуло ногу. Во-первых, горизонтальные перекладины на устройстве были отрегулированы в соответствии с ростом каждого испытуемого путем поднятия высоты верхней перекладины до уровня плеч, а высоты нижней перекладины до уровня колен. Затем испытуемых просили встать посередине беговой дорожки, лицом к устройству и вытянуть одну руку до образования угла в 20 градусов по отношению к вертикальной оси (измерено ручным гониометром). В этом положении мы привязывали один конец веревки к запястью испытуемого, пропускали веревку по верхнему и нижнему блоку, а затем привязывали другой конец веревки к шнурку ипсилатеральной стопы. Эту процедуру повторили с другой стороны. Затем испытуемым дали короткую тренировочную сессию (~ 2–3 минуты) и проинструктировали активно использовать руки, чтобы тянуть веревку, чтобы помочь ногам во время ходьбы. Во время этой тренировки скорость беговой дорожки начиналась с 0,25 м/с. Как только субъект чувствовал себя комфортно и был способен продолжать, скорость вручную увеличивалась на 0,25 м/с, пока не достигала скорости 1,25 м/с. Все испытуемые успешно достигли этой скорости, и им был предоставлен свободный отдых перед продолжением оставшейся части эксперимента.
Затем испытуемым дали короткую тренировочную сессию (~ 2–3 минуты) и проинструктировали активно использовать руки, чтобы тянуть веревку, чтобы помочь ногам во время ходьбы. Во время этой тренировки скорость беговой дорожки начиналась с 0,25 м/с. Как только субъект чувствовал себя комфортно и был способен продолжать, скорость вручную увеличивалась на 0,25 м/с, пока не достигала скорости 1,25 м/с. Все испытуемые успешно достигли этой скорости, и им был предоставлен свободный отдых перед продолжением оставшейся части эксперимента.
Экспериментальные меры
Перед экспериментальными испытаниями испытуемые выполняли 7-минутное испытание стоя, в то время как мы измеряли скорость потребления кислорода и производства углекислого газа для оценки метаболической способности в положении стоя. Затем мы сравнили механические, мышечные и метаболические потребности здоровых людей (n = 8), ходивших на беговой дорожке (1,25 м/с) в двух рандомизированных условиях нормальной (контрольной) ходьбы и ходьбы с помощью. В норме испытуемые ходили без канатно-шкивного устройства. В состоянии помощи (рис. 1) испытуемых подключали к устройству и просили использовать руки, чтобы тянуть веревку, чтобы управлять ногами. Субъекты ходили на двухленточной беговой дорожке (Bertec Corporation, Колумбус, Огайо, США) со скоростью 1,25 м/с для рандомизированных испытаний обычной ходьбы и ходьбы с помощью, причем каждое испытание длилось 7 минут. Субъектам было разрешено полное восстановление ad libitum не менее 5 минут между испытаниями, чтобы уменьшить любые последствия усталости. Во время обоих испытаний мы одновременно измеряли силы опорных реакций (GRF), положение отражающих маркеров, поверхностную электромиографию (ЭМГ), скорость потребления кислорода (\(\dot{V}{\text{O}}_2\)) и углерод производство диоксида (\(\dot{V}{\text{CO}}_2\)) и коэффициент дыхательного обмена (RER) в течение последних трех минут каждого испытания. Во время вспомогательного состояния мы измеряли тяговые силы, создаваемые рукой, с помощью сверхминиатюрных тензодатчиков.
В норме испытуемые ходили без канатно-шкивного устройства. В состоянии помощи (рис. 1) испытуемых подключали к устройству и просили использовать руки, чтобы тянуть веревку, чтобы управлять ногами. Субъекты ходили на двухленточной беговой дорожке (Bertec Corporation, Колумбус, Огайо, США) со скоростью 1,25 м/с для рандомизированных испытаний обычной ходьбы и ходьбы с помощью, причем каждое испытание длилось 7 минут. Субъектам было разрешено полное восстановление ad libitum не менее 5 минут между испытаниями, чтобы уменьшить любые последствия усталости. Во время обоих испытаний мы одновременно измеряли силы опорных реакций (GRF), положение отражающих маркеров, поверхностную электромиографию (ЭМГ), скорость потребления кислорода (\(\dot{V}{\text{O}}_2\)) и углерод производство диоксида (\(\dot{V}{\text{CO}}_2\)) и коэффициент дыхательного обмена (RER) в течение последних трех минут каждого испытания. Во время вспомогательного состояния мы измеряли тяговые силы, создаваемые рукой, с помощью сверхминиатюрных тензодатчиков.
Кинематика и кинетика
Перед каждым сбором данных мы получали антропометрические измерения длин сегментов тела и помещали отражающие маркеры на нижние и верхние конечности, используя простой набор маркеров тела, аналогичный Арельяно и Краму [21]. Кроме того, на систему канатных шкивов рука-нога были нанесены светоотражающие маркеры. Наша система захвата движения с двенадцатью камерами была откалибрована с использованием 5-маркерной палочки и стандартной L-образной рамки (Vicon, Оксфорд, Великобритания). Перед каждым испытанием мы записывали 5-секундную калибровку в положении стоя, чтобы использовать ее в качестве базовой линии для GRF и анатомической системы отсчета для каждого сегмента. Кроме того, мы измерили базовую линию тензодатчиков в состоянии покоя. Перед исследованием каждый тензодатчик был откалиброван с известными весами в диапазоне от 0 до 444,82 ньютонов. Наклон калибровочной линии регрессии использовался для преобразования выходного напряжения в силу, выраженную в ньютонах.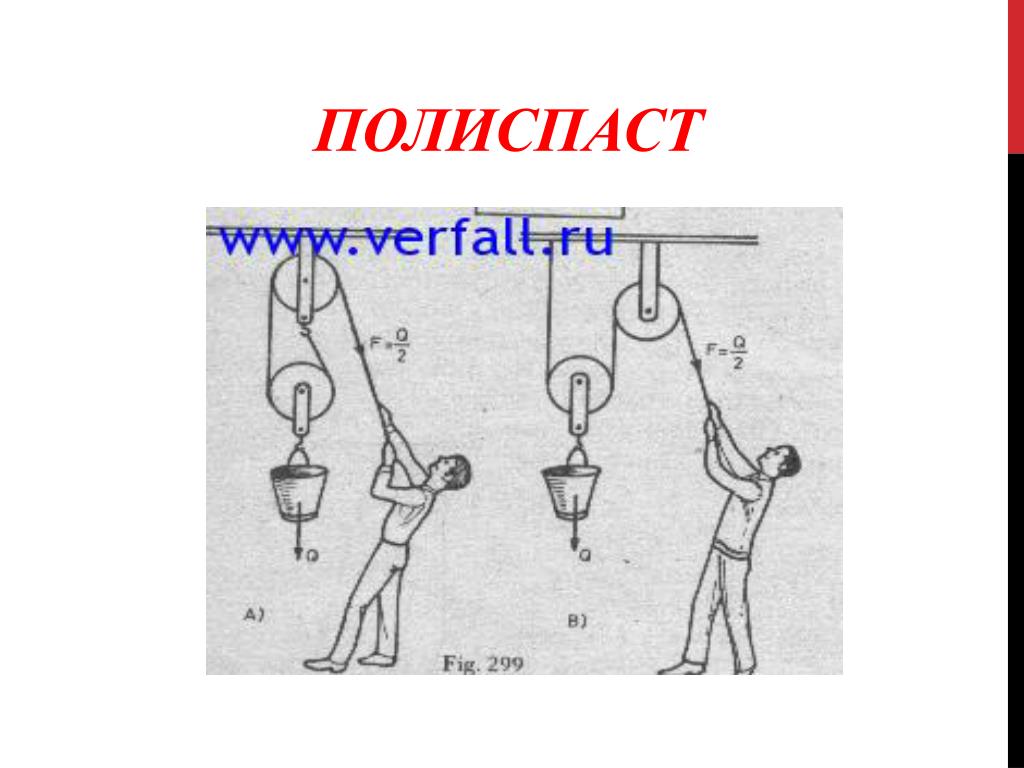 Каждый тензодатчик был помещен на левое и правое соединение каната. Однако из-за аппаратных проблем мы смогли записать данные тензодатчиков с правой стороны только для семи испытуемых. Данные GRF и тензодатчика отбирались с частотой 1000 Гц, тогда как трехмерные положения отражающих маркеров отбирались с частотой 100 Гц.
Каждый тензодатчик был помещен на левое и правое соединение каната. Однако из-за аппаратных проблем мы смогли записать данные тензодатчиков с правой стороны только для семи испытуемых. Данные GRF и тензодатчика отбирались с частотой 1000 Гц, тогда как трехмерные положения отражающих маркеров отбирались с частотой 100 Гц.
Мышечная активность
Мышечная активность правой верхней и нижней конечности измерялась с помощью поверхностных датчиков ЭМГ (Delsys Inc, Натик, Массачусетс, США). Перед экспериментом мы подготовили тело испытуемого к размещению датчика ЭМГ, побрив кожу, чтобы удалить все волосы, а затем протерли кожу спиртовой салфеткой. Датчики устанавливали только на правые мышцы верхней и нижней конечности по рекомендациям SENIAM (seniam.org/sensor_location.htm). После прикрепления датчиков мы закрепили их эластичной лентой, чтобы свести к минимуму артефакты движения. Частота дискретизации была установлена на 2000 Гц, и измерялась активность следующих мышц: задняя дельтовидная (PD), передняя дельтовидная (AD), длинная головка трехглавой мышцы плеча (TRI), двуглавая мышца плеча (BIC), двуглавая мышца бедра (BF).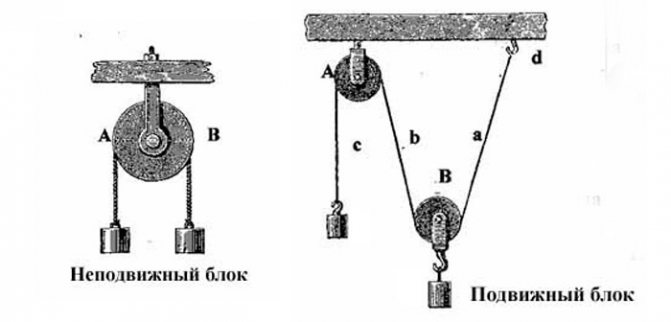 , прямая мышца бедра (RF), камбаловидная мышца (SOL), медиальная икроножная (MG) и передняя большеберцовая мышца (TA). Учитывая, что мы были ограничены девятью датчиками ЭМГ в нашей лаборатории, мы определили четыре мышцы верхних конечностей и пять мышц нижних конечностей для оценки в нашем исследовании. Основываясь на предыдущих исследованиях, которые разделяли роль конкретных мышц во время ходьбы, мы определили мышцы на основе их роли в фазе стояния и поворота при ходьбе. Следуя соглашению Gottschall и Kram [17], мы проанализировали потенциальные изменения в ЭМГ-активности BF, RF и TA как мышц, вносящих вклад в фазу переноса. С другой стороны, мы проанализировали MG и SOL как мышцы, которые вносят вклад в пропульсивный период фазы опоры, а BF, RF, SOL, MG и TA как мышцы, которые способствуют периоду торможения фазы опоры [17, 22, 23]. И, наконец, мы проанализировали возможные изменения ЭМГ-активности всех мышц верхней конечности (PD, AD, TRI и BIC) во время всех трех фаз. В то время как руки не играют непосредственной роли в создании сил вдоль земли при обычной ходьбе, PD, по-видимому, играет основную роль в отводе руки при махе [20], в то время как AD, TRI и BIC, по-видимому, играют тривиальную роль в облегчение махового движения рук [24].
, прямая мышца бедра (RF), камбаловидная мышца (SOL), медиальная икроножная (MG) и передняя большеберцовая мышца (TA). Учитывая, что мы были ограничены девятью датчиками ЭМГ в нашей лаборатории, мы определили четыре мышцы верхних конечностей и пять мышц нижних конечностей для оценки в нашем исследовании. Основываясь на предыдущих исследованиях, которые разделяли роль конкретных мышц во время ходьбы, мы определили мышцы на основе их роли в фазе стояния и поворота при ходьбе. Следуя соглашению Gottschall и Kram [17], мы проанализировали потенциальные изменения в ЭМГ-активности BF, RF и TA как мышц, вносящих вклад в фазу переноса. С другой стороны, мы проанализировали MG и SOL как мышцы, которые вносят вклад в пропульсивный период фазы опоры, а BF, RF, SOL, MG и TA как мышцы, которые способствуют периоду торможения фазы опоры [17, 22, 23]. И, наконец, мы проанализировали возможные изменения ЭМГ-активности всех мышц верхней конечности (PD, AD, TRI и BIC) во время всех трех фаз. В то время как руки не играют непосредственной роли в создании сил вдоль земли при обычной ходьбе, PD, по-видимому, играет основную роль в отводе руки при махе [20], в то время как AD, TRI и BIC, по-видимому, играют тривиальную роль в облегчение махового движения рук [24].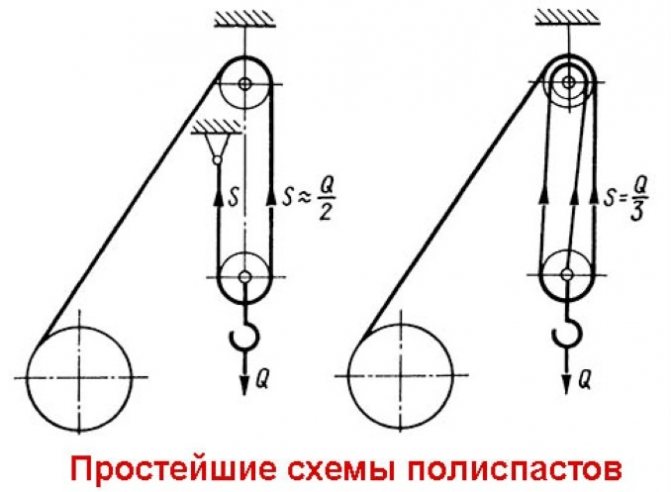 Тем не менее, мы ожидали, что если человек использует свои руки для создания вспомогательной силы при использовании нашего устройства, мышечное усилие будет исходить от мышц плеча и плеча.
Тем не менее, мы ожидали, что если человек использует свои руки для создания вспомогательной силы при использовании нашего устройства, мышечное усилие будет исходить от мышц плеча и плеча.
Метаболическая энергия
Мы собрали метаболические данные с помощью системы непрямой калориметрии, которая измеряет \(\dot{V}{\text{O}}_2\), \(\dot{V}{\text{CO}}_2 \) и RER (ParvoMedics TrueOne 2400, Сэнди, Юта, США). На протяжении каждого испытания, включая спокойное стояние, мы следили за тем, чтобы значения RER находились в диапазоне от 0,7 до 1,0, чтобы подтвердить, что метаболическая энергия в основном обеспечивается за счет аэробного метаболизма. Перед каждым сбором данных выполнялась калибровка 3-литрового расходомера и газа с известными концентрациями газа.
Анализ данных
Используя пользовательский код в MATLAB (MathWorks Inc., Натик, Массачусетс, США), мы скомпилировали GRF, тензодатчик, положения отражающих маркеров и данные ЭМГ в течение последних 3 минут каждого испытания. Мы выполнили анализ данных более 10 последовательных циклов ходьбы, которые были свободны от двигательных артефактов, и анализировали только GRF правой ноги. Данные GRF были отфильтрованы с использованием нуль-фазового фильтра Баттерворта 4-го порядка с частотой среза 20 Гц. По вертикальной GRF наш алгоритм идентифицировал случаи удара пяткой и отрыва носка. Цикл походки определялся как от удара правой пятки до следующего удара правой пяткой. Для каждого цикла походки мы рассчитывали импульс путем вычисления интеграла силы (Н) по времени (с) с использованием трапецеидального метода для данных по вертикали, горизонтали и тензодатчика. Тормозной и пропульсивный импульсы рассчитывались путем интегрирования всех отрицательных и положительных значений из данных горизонтальной GRF, соответственно. Затем значения импульсов усреднялись по 10 циклам ходьбы, а затем нормализовались по массе тела (МТ) для каждого испытуемого. Данные тензодатчика обрабатывались в два этапа: (1) смещение базовой линии удалялось, и (2) напряжение преобразовывалось в ньютоны с использованием наклона калибровочной линии регрессии.
Мы выполнили анализ данных более 10 последовательных циклов ходьбы, которые были свободны от двигательных артефактов, и анализировали только GRF правой ноги. Данные GRF были отфильтрованы с использованием нуль-фазового фильтра Баттерворта 4-го порядка с частотой среза 20 Гц. По вертикальной GRF наш алгоритм идентифицировал случаи удара пяткой и отрыва носка. Цикл походки определялся как от удара правой пятки до следующего удара правой пяткой. Для каждого цикла походки мы рассчитывали импульс путем вычисления интеграла силы (Н) по времени (с) с использованием трапецеидального метода для данных по вертикали, горизонтали и тензодатчика. Тормозной и пропульсивный импульсы рассчитывались путем интегрирования всех отрицательных и положительных значений из данных горизонтальной GRF, соответственно. Затем значения импульсов усреднялись по 10 циклам ходьбы, а затем нормализовались по массе тела (МТ) для каждого испытуемого. Данные тензодатчика обрабатывались в два этапа: (1) смещение базовой линии удалялось, и (2) напряжение преобразовывалось в ньютоны с использованием наклона калибровочной линии регрессии. Затем данные тензодатчиков усреднялись по 10 циклам ходьбы, а затем нормализовались по массе тела для каждого испытуемого.
Затем данные тензодатчиков усреднялись по 10 циклам ходьбы, а затем нормализовались по массе тела для каждого испытуемого.
Трехмерные положения отражающих маркеров сначала были сплайнированы, чтобы скорректировать любые недостающие промежутки в процессе оцифровки, а затем отфильтрованы с использованием нуль-фазового фильтра Баттерворта 9-го порядка с частотой среза 6 Гц. Относительные суставные углы рассчитывали в сагиттальной плоскости по методу Винтера [26]. Были вычислены следующие углы суставов (с соответствующими сегментами тела): плечо (плечо и туловище), локоть (плечо и предплечье), бедро (туловище и бедро), колено (бедро и голень) и лодыжка (голень и стопа). ). Для каждого субъекта относительные углы суставов были выражены по отношению к 5-секундной попытке стоя, которая действовала как их собственная анатомическая система отсчета.
Сигналы ЭМГ были понижены до 1000 Гц, удалено смещение базовой линии и отфильтровано с полосой пропускания от 20 до 450 Гц. Следуя Янгу и Винтеру [25], мы рассчитали линейную огибающую для каждого сигнала в два шага: (1) двухполупериодное выпрямление и (2) нуль-фазовый низкочастотный фильтр Баттерворта 2-го порядка с частотой отсечка 6 Гц. Для каждого цикла походки мы рассчитывали среднюю ЭМГ (аЭМГ) для каждой мышцы во время фазы торможения, пропульсивной и маховой фаз ходьбы (например, аЭМГ ПД во время торможения, аЭМГ ПД во время пропульсивной, аЭМГ ПД во время маха, аЭМГ ПД). AD при торможении и др.). Используя метод Винтера [26], аЭМГ рассчитывали путем интегрирования сигнала по времени и последующего деления на общую продолжительность времени. Затем аЭМГ для каждой мышцы и фазы ходьбы усредняли по 10 циклам походки для каждого субъекта, а затем нормализовали к значению аЭМГ контрольного испытания (значение аЭМГ соответствующей мышцы и фазы во время нормальной ходьбы). В этом случае нормализованное значение аЭМГ каждой мышцы во время каждой фазы нормальной ходьбы равно 1, тогда как нормализованное значение аЭМГ каждой мышцы во время каждой фазы ходьбы с помощником было меньше, равно или больше 1.
Для каждого цикла походки мы рассчитывали среднюю ЭМГ (аЭМГ) для каждой мышцы во время фазы торможения, пропульсивной и маховой фаз ходьбы (например, аЭМГ ПД во время торможения, аЭМГ ПД во время пропульсивной, аЭМГ ПД во время маха, аЭМГ ПД). AD при торможении и др.). Используя метод Винтера [26], аЭМГ рассчитывали путем интегрирования сигнала по времени и последующего деления на общую продолжительность времени. Затем аЭМГ для каждой мышцы и фазы ходьбы усредняли по 10 циклам походки для каждого субъекта, а затем нормализовали к значению аЭМГ контрольного испытания (значение аЭМГ соответствующей мышцы и фазы во время нормальной ходьбы). В этом случае нормализованное значение аЭМГ каждой мышцы во время каждой фазы нормальной ходьбы равно 1, тогда как нормализованное значение аЭМГ каждой мышцы во время каждой фазы ходьбы с помощником было меньше, равно или больше 1.
Для создания ансамблевых кривых каждого субъекта (см. Дополнительный файл 2: рисунок S1) каждая зависимая переменная была сплайнирована для каждого цикла походки, чтобы быть выраженной как от 0% до 100% цикла походки, усредненное по всем 10 циклам походки (среднее по ансамблю ) и нормализованы, как описано выше. Мы количественно оценили кривые среднего ансамбля путем усреднения кривых исследуемого ансамбля.
Мы количественно оценили кривые среднего ансамбля путем усреднения кривых исследуемого ансамбля.
В течение последних 3 минут каждого испытания мы усредняли значения RER и рассчитывали метаболическую мощность на основе средневзвешенного значения \(\dot{V}{\text{O}}_2\) и \(\dot{V}{ \text{CO}}_2\) по уравнению Броквея [27]. Чистая метаболическая мощность была получена путем вычитания скорости метаболизма в положении стоя из скорости метаболизма при ходьбе в каждом испытании.
Статистический анализ
Предположение о нормальности каждой переменной было проверено с помощью теста Колмогорова–Смирнова. Стандартные парные t -тесты проводились на переменных, удовлетворяющих предположению о нормальности; в противном случае для проверки существенных различий между нормальными условиями ходьбы и ходьбой с помощью использовался непараметрический критерий знакового ранга Уилкоксона для родственных выборок. Для всех зависимых переменных мы сравнивали ходьбу с помощью с обычной ходьбой с использованием двустороннего теста, за исключением активности мышц на ЭМГ во время фазы переноса. Мы предположили, что при использовании устройства субъекты будут использовать руки для создания вспомогательной силы, помогающей двигать ногой, что будет отражать увеличение активности мышц рук (AD, PD, TRI и BIC) и снижение активности мышц ног. (БФ, РФ и ТА). Поэтому мы проверили существенные различия в мышечной активности во время фазы переноса, используя односторонний парный t -критерий или односторонний критерий знакового ранга Уилкоксона для родственных образцов. Все статистические тесты проводились с уровнем альфа 0,05 (IBM SPSS Inc., Чикаго, Иллинойс, США). Статистическую таблицу для биомеханических и метаболических данных можно найти в таблице 1. Кроме того, все статистические таблицы для данных аЭМГ можно найти в дополнительных таблицах 1–3 (см. Дополнительный файл 3: Таблица S1). В таблицах мы приводим точные значения p . Хотя в основной текст мы включаем, когда p меньше или больше 0,05, если не указано иное.
Мы предположили, что при использовании устройства субъекты будут использовать руки для создания вспомогательной силы, помогающей двигать ногой, что будет отражать увеличение активности мышц рук (AD, PD, TRI и BIC) и снижение активности мышц ног. (БФ, РФ и ТА). Поэтому мы проверили существенные различия в мышечной активности во время фазы переноса, используя односторонний парный t -критерий или односторонний критерий знакового ранга Уилкоксона для родственных образцов. Все статистические тесты проводились с уровнем альфа 0,05 (IBM SPSS Inc., Чикаго, Иллинойс, США). Статистическую таблицу для биомеханических и метаболических данных можно найти в таблице 1. Кроме того, все статистические таблицы для данных аЭМГ можно найти в дополнительных таблицах 1–3 (см. Дополнительный файл 3: Таблица S1). В таблицах мы приводим точные значения p . Хотя в основной текст мы включаем, когда p меньше или больше 0,05, если не указано иное.
Полноразмерная таблица
Результаты
Кинетика и кинематика
Вспомогательная сила создавалась между ~ 30 и ~ 70% цикла ходьбы и достигала максимума при 60% (рис. ). В течение всего цикла ходьбы вспомогательная сила, т. е. напряжение, создаваемое одним физическим соединением односторонней руки и ноги, прикладывала общий импульс 0,0208 Н·с/масса массы тела при средней пиковой силе 7 % от тела. масса. Для всех испытуемых увеличение вспомогательной силы совпало с увеличением протракции плеча (см. Дополнительный файл 2: рисунок S1). Однако изменение угла локтевого сустава варьировало; некоторые испытуемые сгибали локоть, другие разгибали, а некоторые сохраняли относительно фиксированный угол (см. Дополнительный файл 2: рисунок S1). Несмотря на изменения в поведении локтевого сустава во время увеличения силы, вспомогательная сила вызвала снижение пропульсивного импульса на 43 % и увеличение тормозного импульса, генерируемого ногой, на 46 % (измерено горизонтальной GRF; двусторонний 9).0250 p’s < 0,001; Рис. 2б). Кроме того, не было изменений ни в вертикальном импульсе (двухсторонний p = 0,842; рис. 2c), ни в частоте шагов (двухсторонний p = 0,121).
). В течение всего цикла ходьбы вспомогательная сила, т. е. напряжение, создаваемое одним физическим соединением односторонней руки и ноги, прикладывала общий импульс 0,0208 Н·с/масса массы тела при средней пиковой силе 7 % от тела. масса. Для всех испытуемых увеличение вспомогательной силы совпало с увеличением протракции плеча (см. Дополнительный файл 2: рисунок S1). Однако изменение угла локтевого сустава варьировало; некоторые испытуемые сгибали локоть, другие разгибали, а некоторые сохраняли относительно фиксированный угол (см. Дополнительный файл 2: рисунок S1). Несмотря на изменения в поведении локтевого сустава во время увеличения силы, вспомогательная сила вызвала снижение пропульсивного импульса на 43 % и увеличение тормозного импульса, генерируемого ногой, на 46 % (измерено горизонтальной GRF; двусторонний 9).0250 p’s < 0,001; Рис. 2б). Кроме того, не было изменений ни в вертикальном импульсе (двухсторонний p = 0,842; рис. 2c), ни в частоте шагов (двухсторонний p = 0,121).
Средние совокупные силы, демонстрирующие механические требования как при нормальной (черная линия), так и при ходьбе с помощью (синяя линия). a Во время ~ 30–70% цикла ходьбы вспомогательная сила создавалась односторонним соединением веревки руки и ноги (заштрихованная серая область; н = 7). Эту вспомогательную силу лучше всего понимать как направленную вперед силу, приложенную ко всему телу. b Это, в свою очередь, вызвало снижение пропульсивной и увеличение тормозной силы, создаваемой ногой при ходьбе с поддержкой по сравнению с обычной ходьбой ( n = 8). c Вертикальная ФГР, необходимая для поддержания и ускорения тела, оставалась одинаковой в обоих условиях ( n = 8). Обратите внимание, что вспомогательная сила создавалась соединением веревки правой руки и ноги, а другая вспомогательная сила — соединением веревки левой руки и ноги, но мы иллюстрируем только вспомогательную силу, создаваемую правой стороной 9.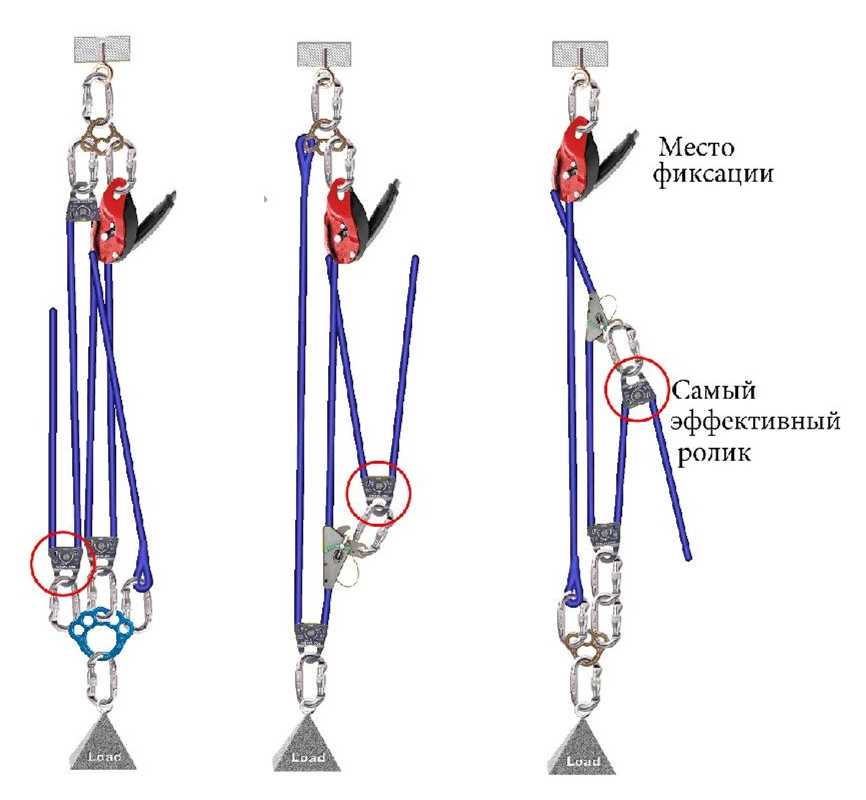 0003
0003
Изображение в полный размер
Мышечная активность при ходьбе с поддержкой
Фаза торможения (рис. 3а)
Рис. 3Средняя электромиографическая (аЭМГ) активность при ходьбе с поддержкой. Мы оценили в общей сложности четыре мышцы верхних и пять мышц нижних конечностей (среднее ± SE; n = 8; см. список сокращений). Каждое значение выражено относительно нормальной ходьбы, представляя базовый уровень 100% (штриховая черная линия). Эти данные показывают мышечный сдвиг, характеризующийся большей активностью мышц рук и меньшей активностью мышц ног. В частности, трицепс и бицепс руки были основными мышцами, которые помогали передавать вспомогательную силу на все тело во время пропульсивной фазы, что уменьшало нагрузку на медиальную икроножную и камбаловидную мышцы ноги. * указывает на значительное отличие от исходного уровня, p < 0,05
АЭМГ-активность TRI, BIC и AD увеличилась на 106%, 239% и 200% соответственно (двусторонний p’s < 0,05). При этом активность аЭМГ передней ПП увеличилась на 14% (двусторонняя p = 0,012).
При этом активность аЭМГ передней ПП увеличилась на 14% (двусторонняя p = 0,012).
Пропульсивная фаза (рис. 3b)
Активность аЭМГ TRI и BIC увеличилась на 132% и 309% соответственно (двухсторонний p s < 0,05). Для мышц ног аЭМГ МГ и СОЛ снизилась на 52% и 38% соответственно (двусторонний p’s < 0,001).
Фаза колебания (рис. 3с)
Активность аЭМГ TRIC, BIC и AD увеличилась на 147%, 420% и 125% соответственно (односторонний p s < 0,05). В исследованных мышцах ног мы не обнаружили снижения активности аЭМГ РФ, БФ или ТА (односторонний p s > 0,05).
Метаболическая энергия
Чистая метаболическая мощность, необходимая для нормальной ходьбы (3,04 ± 0,57 Вт/кг), превышала чистую метаболическую мощность, необходимую для ходьбы с помощью (2,53 ± 0,37 Вт/кг; т (7) = 5,526, двусторонний р = 0,001; Рис. 4). Кроме того, не было никаких существенных различий в значениях RER между нормальной (0,85 ± 0,04) и ходьбой с помощью (0,80 ± 0,06; t (7) = 2,075, двусторонней p = 0,077).
Потребность в чистой метаболической энергии при ходьбе. Использование системы блоков «рука-нога» снизило чистую метаболическую мощность, необходимую для ходьбы, на 17% (среднее значение ± SD, n = 8). Каждый сегмент линии представляет субъекта, подчеркивая наблюдение, что все субъекты показали снижение чистой метаболической мощности (* означает p < 0,05)
Изображение в полный размер
Обсуждение
Мы обнаружили, что руки играют решающую роль в выявлении изменений в механических и мышечных требованиях ноги во время пробной ходьбы. Мы обнаружили, что рука помогала модулировать величину вспомогательной силы, которая воздействовала на все тело, а не непосредственно на ноги. Тем не менее, мышечная потребность рук увеличилась, а мышечная потребность ног уменьшилась, но этот компромисс произошел во время пропульсивной фазы, а не в фазе ходьбы, как мы изначально предполагали. Как мы более подробно обсудим ниже, кажется, что руки могли использовать энергию от приводного от двигателя ремня беговой дорожки, чего мы не предвидели при осмыслении механических эффектов физического соединения рук и ног с помощью простого веревочного шкива. система. В целом, мы отвергаем нашу первую гипотезу, потому что испытуемые не использовали руки активно, чтобы помогать махам ногой, а вместо этого активно использовали руки, чтобы помогать двигаться вперед. Наконец, мы обнаружили, что физическая связь позволяет руке, ноге и беговой дорожке взаимодействовать таким образом, что приводит к снижению чистой метаболической мощности, необходимой для ходьбы, на 17%, что также заставляет нас отвергнуть нашу вторую гипотезу. Исходя из этих экспериментальных данных, мы пришли к выводу, что снижение чистой метаболической мощности, необходимой для ходьбы, может быть в первую очередь объяснено снижением потребности в создании движущей силы ногами.
Фазы ходьбы с поддержкой (см. дополнительный файл 4)
Фаза движения вперед (рис. 5a)
Рис. 5 Ходьба с поддержкой. a Во время пропульсивной фазы правая стопа ставится на полотно беговой дорожки, которое перемещается назад. В свою очередь, это движение тянуло правую руку вперед. Повышенная мышечная активность бицепсов и трицепсов (ярко-красные) помогла напрячь руку, что было необходимо для передачи усилия на все тело, вызывая результирующую силу, направленную вперед. Чистая поступательная сила уменьшила потребность в толчке правой ноги и, следовательно, уменьшила мышечную потребность медиальной икроножной и камбаловидной мышц (фиолетовый). b В фазе маха активность мышц бицепса, трицепса и передней дельтовидной мышцы руки (ярко-красный цвет) увеличилась, но эта активность не совпадала со снижением активности мышц ноги. c Во время фазы торможения правая рука качнулась назад, не вызывая натяжения веревки. В то же время левая рука помогала передавать вспомогательную силу на все тело во время пропульсивной фазы левой ноги. Эта поступательная сила, создаваемая соединением левой руки и ноги, уменьшала потребность в движении левой ноги, но увеличивала потребность в торможении правой ноги. Таким образом, произошло увеличение активности правой передней большеберцовой мышцы (ярко-красный цвет)
Изображение в полный размер
Во время пропульсивной фазы нормальной ходьбы, которая составляет от 30 до 60% цикла ходьбы, нога создает силу, отталкивающую от земли и толкающую тело вперед. Как показано на рис. 2а, вспомогательная сила возникает на протяжении всей фазы движения. Увеличение вспомогательной силы совпало с движением ноги назад вместе с лентой беговой дорожки, в то время как стопа оставалась на месте. В то же время ипсилатеральную руку тянули вперед. Вероятным объяснением является то, что испытуемые использовали систему веревки и шкива, чтобы воспользоваться механической работой, выполняемой двигателем беговой дорожки и движущимся полотном (аналогично Санчесу и др. [28]). Таким образом, по мере того, как беговое полотно тянуло соединение стопы и веревки в обратном направлении, оно также тянуло ипсилатеральное соединение запястья и веревки в направлении вперед. Это указывало бы на то, что механическая энергия движущегося полотна беговой дорожки передавалась на веревку, которая соединяла опорную ногу и ипсилатеральную руку. Если предположить, что силы трения вдоль шкивов пренебрежимо малы, сила, тянущая в месте соединения стопы с веревкой, будет аналогична силе, тянущей в месте соединения запястья с веревкой. В общем, вспомогательную силу лучше всего понимать как направленную вперед силу, приложенную как к соединению запястья с веревкой, так и к соединению стопы с веревкой и, таким образом, тянущую все тело вперед. Этот эффект аналогичен приложению внешней силы, толкающей все тело в пояснице [22, 29].].
В то время как тянущие силы действовали как на стопу, так и на запястье, кинематика нижних конечностей, тазобедренного и коленного суставов, оставалась относительно неизменной, но кинематика верхних конечностей, плечевого и локтевого суставов, отличалась по сравнению с обычной ходьбой (см. Дополнительный файл 2: Рисунок S1). Хотя стандартный протокол прикрепления веревки к запястью и стопе был одинаковым для всех испытуемых, наш метод физического соединения рук и ног приводил к более согнутой или вытянутой руке на протяжении всего испытания ходьбы с помощью. Быстрое увеличение вспомогательной силы, измеряемой тензодатчиком, сопровождалось увеличением вытягивания плеча, в результате чего вся рука поворачивалась вперед. Кроме того, испытуемые применяли различные стратегии локтевого сустава во время подъема силы. Четверо испытуемых выполнили сгибание в локтевом суставе, двое — разгибание в локтевом суставе, а один испытуемый сохранил фиксированный угол в локтевом суставе. Несмотря на используемую стратегию локтя, испытуемые все же нашли способ использовать руки, чтобы помочь движению тела.
Кроме того, мы наблюдали одновременное увеличение активности аЭМГ BIC и TRI мышц плеча (рис. 3). Мы интерпретируем совместную активацию BIC и TRI как средство для укрепления локтевого сустава. Кинематическая и мышечная реакция руки позволяет предположить, что рука играла активную роль в облегчении и модулировании величины вспомогательной силы, измеряемой тензодатчиком в месте соединения запястья с веревкой. В отсутствие этой модулированной реакции величина вспомогательной силы, создаваемой запястьем, могла возникать более резко, вызывая резкие движения всего тела и потенциально нарушая контроль равновесия от шага к шагу. Хотя наша интерпретация предполагает, что руки не были основным источником энергии, как мы ожидали, активное использование рук по-прежнему было ключом к модулированию вспомогательной силы и обеспечению движущего воздействия на все тело. Движущий эффект уменьшал необходимость отталкивания задней ногой от земли, что эффективно снижало импульс движения на 43% (таблица 1) и сопровождалось снижением мышечной потребности MG и SOL на 52% и 38% (рис. 3), которые являются двумя ключевыми мышцами, влияющими на способность ноги генерировать пропульсивные импульсы при ходьбе [22, 23].
Фаза маха (рис. 5b)
После пропульсивной фазы нормальной ходьбы нога отрывается от земли и качается вперед, что соответствует фазе маха (~ 60–100% цикла ходьбы). Как показано на рис. 2а, вспомогательная сила быстро уменьшалась между 60 и 70% цикла походки, что соответствует периоду начала маха ногой. В это время рука отклонялась назад (см. Дополнительный файл 2: рисунок S1) и сопровождалась относительным увеличением активности аЭМГ TRI, BIC и AD (рис. 3). Увеличение активности TRI и BIC, вероятно, отражает их роль в их постоянной коактивации в локтевом суставе для модуляции вспомогательной силы, поскольку она быстро снижалась во время начала маха ногой. Перед фазой качания при ходьбе рука тянулась вперед лентой беговой дорожки с приводом от двигателя, из-за чего рука подвергалась большему вытягиванию. Следовательно, АД мог помочь контролировать и стабилизировать плечевой сустав, так как он подвергался большему диапазону ретракции во время фазы переноса при ходьбе. В отношении изучаемых здесь мышц голени (рис. 3) мы не обнаружили снижения аЭМГ-активности БФ, РФ или ТА, которые представляют собой совокупность мышц, облегчающих качательное движение ноги [17]. Мы понимаем, что нам не хватает измерений ЭМГ от подвздошно-поясничной мышцы, сгибателя бедра, которая играет ключевую роль в инициировании маха ногой [17]. Возможно, вспомогательная сила помогла снизить мышечную активность подвздошно-поясничной мышцы, но это маловероятно, учитывая, что и подвздошно-поясничная мышца, и прямая мышца бедра действуют синергетически, чтобы инициировать мах ногой. Таким образом, если бы система блока «рука-нога» помогала инициировать мах ногой, то мы должны были бы наблюдать снижение АЭМГ прямой мышцы бедра, но этого не произошло. Эти данные позволяют сделать вывод, что система блоков «рука-нога» мало влияла на раскачивание ноги во время ходьбы.
Фаза торможения (рис. 5c)
После фазы раскачивания при обычной ходьбе нога касается земли и создает тормозную силу, которая замедляет движение тела вперед. Чтобы компенсировать это, задняя нога создает равную по величине движущую силу, что помогает достичь постоянной скорости ходьбы. При использовании системы блоков «рука-нога» тормозной импульс увеличился на 46 % по сравнению с обычной ходьбой (табл. 1). Хотя вспомогательная сила в это время составляет ~ 1% BW (рис. 2а), вспомните, что эта вспомогательная сила представляет собой натяжение веревки, соединяющей правую руку и ногу. Мы не можем игнорировать тот факт, что еще одна вспомогательная сила создается соединением левой руки, ноги и полотна беговой дорожки. В этом случае энергия левого полотна беговой дорожки используется для продвижения тела вперед как за счет левого запястья, так и за счет соединения стопы со канатом. Затем поступательная сила распределяется между обеими ногами во время двойной опоры, т. Е. Когда обе ступни соприкасаются с землей (~ 50–62% цикла ходьбы). Вспомогательная сила поможет уменьшить потребность в движении левой ноги, но увеличит тормозную силу, создаваемую правой ногой, для поддержания постоянной скорости. Таким образом, большая тормозная сила является следствием направленной вперед силы, действующей на все тело, и имела непреднамеренные последствия на мышечном уровне, вызывая увеличение активности аЭМГ на 14% (рис. 3). При обычной ходьбе TA мышечно-сухожильный блок играет важную роль в поглощении энергии в ранний период фазы торможения [30]. TA функционирует для управления крутящим моментом подошвенного сгибания, возникающим в голеностопном суставе, вызванным тормозной силой, создаваемой ногой при ее контакте с землей [28]. Таким образом, большая сила торможения будет означать более высокие потребности в поглощении энергии голеностопным суставом, а повышенная активность аЭМГ в ОП предполагает увеличение его сократительной силы для удовлетворения этих потребностей в поглощении энергии.
Кроме того, в фазе торможения произошло увеличение активности аЭМГ АД, ТРИ и БИК руки (рис. 3). Это кажется нелогичным, учитывая относительно небольшое натяжение веревки (~ 1% BW). Хотя механизм не ясен, мы предполагаем, что изменения в активности аЭМГ могут отражать увеличенный диапазон движений плечевого и локтевого суставов, что изменило нормальный переход от ретракции маха рукой к протракции (см. Дополнительный файл 2: Рисунок S1). Повышение активности аЭМГ АД будет способствовать быстрому переходу от максимальной ретракции к протракции для поддержания координации с ногами, в то время как BIC и TRI будут действовать как стабилизаторы локтевого сустава.
Метаболическая энергия
При обычной ходьбе махи руками связаны с небольшими метаболическими затратами, поскольку движения вперед и назад возникают в результате комбинации активной мышечной активации [20, 24] и пассивной динамики [31,32,33]. Тем не менее, мышечная активность мышц рук кажется относительно небольшой. При скорости ходьбы ~ 1,1 м/с средняя ЭМГ-активность, наблюдаемая при ПД, остается менее 5% от его максимального произвольного сокращения (МПС) [24]. Кроме того, средняя активность ЭМГ остается близкой к нулю для AD (< 2% MVC), TRI (< 1% MVC) и BIC (< 0,5% MVC), предполагая, что эти мышцы играют незначительную роль в махах руками. Напротив, при использовании системы блоков «рука-нога» активное использование рук требовало 3-6-кратного увеличения активности аЭМГ мышц верхних конечностей (TRI, BIC и AD; рис. 3) по сравнению с нормальная ходьба, вероятно, связанная с метаболическими затратами. Тем не менее, активное использование рук для приведения в движение всего тела привело к снижению чистой метаболической мощности на 17% (рис. 4). Следует отметить, что это снижение чистой метаболической мощности не зависело от необходимости поддерживать и ускорять тело в вертикальном направлении, поскольку испытуемые не изменяли вертикальный импульс, который они прикладывали к земле. В частности, наши результаты показывают, что любые затраты, связанные с активным использованием рук, перевешиваются снижением затрат, вызванным снижением двигательной нагрузки на ноги, что приводит к чистому снижению метаболических затрат при ходьбе.
В то время как наша система канатных шкивов рука-нога явно снизила двигательную нагрузку на ноги, может показаться удивительным, что этот эффект приводил к чистому снижению метаболической мощности, необходимой для ходьбы, несмотря на то, что испытуемые генерировали более высокие тормозные силы. Однако хорошо известно, что создание тормозных сил метаболически дешевле, чем создание движущих сил [22, 34], что согласуется с нашими выводами. В нашем исследовании испытуемые использовали систему блоков «рука-нога» для создания средней пиковой вспомогательной силы в 7 % МТ, что совпадало со снижением пропульсивного импульса на 43 % и увеличением тормозного импульса на 46 %, вызывая 17-процентное снижение чистой метаболической активности. сила. Эти наблюдения показывают, что даже если активное использование рычагов и создание больших тормозных сил требовало затрат, это было перевешиваемо снижением затрат за счет создания более низких движущих сил. Таким образом, наблюдаемое здесь снижение чистой метаболической мощности на ~ 17 % может быть в первую очередь объяснено снижением механической потребности ноги в создании движущей силы.
Ограничения и будущие направления
При использовании системы шкивов рука-нога руки не помогали движению ног напрямую, как мы ожидали. Все еще можно позволить рукам помогать махам ногой; однако для этого потребуется аппаратная модификация существующей системы шкивов «рука-нога». Механизм сцепления/зубчатой передачи может быть встроен в систему шкивов рука-нога, чтобы обеспечить прямую передачу энергии от рук к ногам. В качестве альтернативы, носимое на теле устройство может проверить влияние использования рук для помощи при качании ног без воздействия беговой дорожки с приводом от двигателя. В носимом на теле устройстве сила будет внутренней по отношению к телу, а также обеспечит прямую передачу энергии от рук к ногам. Мы планируем внести модификации в аппаратное обеспечение, которые позволят в будущих исследованиях выяснить, может ли активное использование рук помочь управлять движением ног во время ходьбы.
Хотя наше устройство не позволяло рукам помогать махать ногой, мы обнаружили, что руки все же могут играть активную роль в движении вперед. Ограничением этого исследования является то, что мы не предвидели людей, использующих свои руки, чтобы использовать энергию двигателя беговой дорожки / движущегося полотна. Тем не менее, предоставление человеку возможности использовать вспомогательное устройство «рука-нога» во время ходьбы на беговой дорожке может быть полезным для людей, проходящих реабилитацию походки. Будущие эксперименты помогут нам понять, могут ли люди с нарушениями нижних конечностей активно использовать свои руки таким образом. Как наблюдалось в экспериментах по ходьбе лежа у пациентов, выздоравливающих после ТСМ [10, 35], и в экспериментах по езде на велосипеде у пациентов, выздоравливающих после инсульта [11, 12], те, у кого сохранилась функция рук, могут научиться активно двигаться. координация рук и ног при ходьбе. Преднамеренное использование рук может побуждать пациентов к активному (самоуправляемому) действию вместо пассивного (управляемого извне), что может произойти, когда физиотерапевты или даже вспомогательные устройства с электроприводом выполняют шагающее движение. Кроме того, основным преимуществом нашего подхода является то, что снижение двигательной нагрузки на ноги привело к значительному снижению метаболических затрат, необходимых для ходьбы. Мы признаем, что по сравнению с другими вмешательствами, когда испытуемые учились ходить с помощью вспомогательного устройства для нижних конечностей [36, 37], время, отведенное нашим участникам, было относительно коротким. Вполне возможно, что экономия метаболических затрат была бы значительно больше при большем количестве тренировок, что позволило бы провести адаптационный период. Несмотря на это, мы все еще наблюдали снижение чистой метаболической мощности. Это кажется полезным, учитывая, что другие вспомогательные методы (например, использование костылей или голеностопных ортезов) увеличивают метаболические затраты при ходьбе [38]. Кроме того, наблюдаемая здесь метаболическая экономия может помочь увеличить продолжительность сеанса переобучения походке, что позволит увеличить повторение шагов, что имеет решающее значение для восстановления функции ходьбы [2, 16].
Несмотря на то, что наша система блоков «рука-нога» обещает помочь в движении вперед и снизить метаболические затраты, необходимы будущие эксперименты, чтобы понять, применимы ли эти результаты к тем, кто проходит реабилитацию ходьбы. Мы должны иметь в виду, что это исследование проводилось на здоровых людях, идущих со скоростью 1,25 м/с, и следует отметить, что эта скорость намного выше, чем типичные скорости, принятые некоторыми клиническими популяциями. Еще одна проблема с существующей системой шкивов рука-нога заключается в том, что эффективная передача силы между руками и ногами может быть изменена, если человек смещается назад на беговой дорожке. Хотя это не было серьезной проблемой для наших испытуемых, неизвестно, насколько хорошо клинические популяции адаптируются к этой настройке. Кроме того, еще предстоит понять, не нарушит ли такое соединение рук и ног равновесие. Эти проблемы можно решить, интегрировав наше устройство шкива рука-нога с поддержкой веса тела, которое обычно строится с фиксированной системой подвески, окружающей беговую дорожку. Обеспечение поддержки веса тела с помощью фиксированной системы подвески поможет пациенту сохранить свое положение на беговой дорожке, а также сведет к минимуму необходимость активного поддержания равновесия. Наконец, более высокие тормозные усилия, наблюдаемые здесь, могут вызывать опасения по поводу повреждения мышц нижних конечностей, но этого можно избежать с помощью прогрессивной тренировки [39]., 40]. Принимая во внимание все эти факторы, наша будущая работа направлена на интеграцию поддержки веса тела с нашей системой блоков «рука-нога», что поможет нам понять ее механическое и метаболическое влияние на ходьбу как у здоровых, так и у пациентов.
Учитывая, что мы представили доказательство концепции активного использования рук во время ходьбы на беговой дорожке, теперь можно изучить, может ли интеграция нашего подхода с поддержкой веса тела еще больше оптимизировать специфичность задачи и восстановление при ходьбе. Поддержка веса тела во время ходьбы на беговой дорожке уже позволяет воспринимать сенсорные сигналы ритмичного шага, вертикального положения и более нормальной кинематики суставов по сравнению с ходьбой в положении лежа или ездой на велосипеде. Сочетание их с системой блоков рука-нога может добавить еще один сенсорный сигнал. Имеются убедительные доказательства наличия связанного нервного пути между руками и ногами [3, 5, 41], и кажется, что это нейронное соединение можно использовать только тогда, когда маховые движения рук координируются с шагающими движениями ног [3, 5, 41]. 3]. Эксперименты с ходьбой лежа предполагают, что активное использование рук может помочь модулировать этот путь за счет усиления мышечной активности ног как у здоровых людей, так и у пациентов с ТСМ [8, 35, 41]. Кроме того, увеличение усилия рук за счет большего сопротивления рукояти приводит к увеличению амплитуды нервно-мышечной активности пассивно движущихся ног, что свидетельствует о том, что нервный путь может дополнительно модулироваться усилием руки [35, 41]. У людей с травмой спинного мозга функциональные улучшения в ходьбе были обнаружены у этих людей, проходящих тренировку шагания лежа [10]. Похоже, что использование этого связанного с нейронами пути может помочь спинному мозгу снова научиться ходить. Ясно, что в этом исследовании руки прикладывали больше усилий при использовании системы блоков «рука-нога», но колебательное движение рук (чрезмерное вытягивание плеча и разгибание локтя) отклонялось от нормального диапазона движения, наблюдаемого при нормальной ходьбе. Будет важно понять, будет ли этот чрезмерный тип размахивания руками использовать или, возможно, нарушить нервную связь, которая лежит в основе скоординированного движения рук и ног во время ходьбы.
Выводы
Подводя итог, мы обнаружили, что наш простой метод физического соединения рук и ног во время ходьбы не помогал двигать ногами, как ожидалось. Вместо этого мы обнаружили, что с помощью веревки, соединяющей наши руки и ноги, испытуемые могут использовать энергию ремня беговой дорожки с приводом от двигателя, чтобы помогать двигаться всему телу во время ходьбы. Передняя помощь всем телом помогла снизить потребность ног в создании движущей силы, что привело к значительному снижению чистой метаболической мощности, необходимой для ходьбы. Наши данные показывают, что руки играли активную роль в содействии приведению в движение всего тела, а ключевой конструктивной особенностью нашей системы блоков «рука-нога» является то, что пользователи сами могут вызвать механическое и мышечное смещение, которое требует уникального компромисса между активным использование рук и ног. Представленные здесь результаты обеспечивают биомеханическую и энергетическую основу для того, как мы могли бы переосмыслить активное использование рук в реабилитации ходьбы, открывая возможность изучить, может ли такая система блоков «рука-нога» помочь пациентам восстановить способность ходить.
Доступность данных и материалов
Наборы данных, использованные и/или проанализированные в ходе текущего исследования, можно получить у соответствующего автора по обоснованному запросу.
Сокращения
- ЭМГ:
Электромиография
- \(\точка{V}{\текст{O}}_2\) :
Потребление кислорода
- \(\dot{V}{\text{CO}}_2\) :
Производство двуокиси углерода
- RER:
Коэффициент дыхательного обмена
- ФГР:
Сила реакции земли
- ЭМГ:
Средняя электромиография
- ПД:
Задняя часть дельтовидной мышцы
- н.э.:
Передняя часть дельтовидной мышцы
- ТРИ:
Трехглавая мышца плеча
- БИК:
Двуглавая мышца плеча
- БФ:
Двуглавая мышца бедра
- РФ:
Прямая мышца бедра
- СОЛ:
Солеус
- МГ:
Медиальная часть икроножной мышцы
- ТП:
Передняя большеберцовая мышца
- ШБ:
Масса тела
Ссылки
Берман А.Л., Харкема С.Дж. Локомоторная тренировка после травмы спинного мозга человека: серия тематических исследований. физ. тер. 2000;80(7):688–700. https://doi.org/10.1093/ptj/80.7.688.
КАС Статья пабмед Google ученый
Дитц В., Фуад К., Бастиаансе К.М. Нейронная координация движений рук и ног при передвижении человека. Евр Джей Нейроски. 2001; 14 (11): 1906–14. https://doi.org/10.1046/j.0953-816x.2001.01813.x.
КАС Статья пабмед Google ученый
Zehr EP, Balter JE, Ferris DP, Hundza SR, Loadman PM, Stoloff RH. Нейронная регуляция ритмичных движений рук и ног сохраняется при выполнении двигательных задач человека. Дж. Физиол. 2007;582:209–27. https://doi.org/10.1113/jphysiol.2007.133843.
КАС Статья пабмед ПабМед Центральный Google ученый
Ferris DP, Huang HJ, Kao P. Движение рук для активации ног. Exerc Sport Sci Rev. 2006;34(3):113–20. https://doi.org/10.1249/00003677-200607000-00005.
Артикул пабмед Google ученый
Кавасима Н., Нодзаки Д., Абэ М.О., Наказава К. Формирование соответствующего локомотивного мотора через межконечностные нервные пути в спинном мозге у людей.
J Нейрофизиол. 2008;99(6):2946–55. https://doi.org/10.1152/jn.00020.2008.Артикул пабмед Google ученый
Kam D, Rijken H, Manintveld T, Nienhuis B, Dietz V, Duysens J. Движения рук могут увеличить активность мышц ног во время субмаксимальной ходьбы в положении лежа у людей с неврологической интактностью. J Appl Physiol. 2013;115(1):34–42. https://doi.org/10.1152/japplphysiol.00510.2012.
Артикул пабмед Google ученый
Огава Т., Сато Т., Огата Т., Ямамото С.И., Наказава К., Кавасима Н. Ритмичные махи руками усиливают характерную локомоторную мышечную активность при пассивных движениях нижних конечностей. Physiol Rep. 2015;3(3):e12317. https://doi.org/10.14814/phy2.12317.
Артикул пабмед ПабМед Центральный Google ученый
Чжоу Р.
, Альварадо Л., Огилви Р., Чонг С.Л., Шоу О., Мушахвар В.К. Вмешательство, не связанное с походкой, для реабилитации ходьбы после травмы спинного мозга: роль рук. J Нейрофизиол. 2018;119(6): 2194–211. https://doi.org/10.1152/jn.00569.2017.Артикул пабмед Google ученый
Каупп С., Пирси Г.Э.П., Кларнер Т., Сан Ю., Каллен Х., Барсс Т.С., Зер Э.П. Ритмичная тренировка рук на велосипеде улучшает ходьбу и нейрофизиологическую целостность при хроническом инсульте: руки могут помочь ногам в реабилитации. J Нейрофизиол. 2018;119(3):1095–112. https://doi.org/10.1152/jn.00570.2017.
Артикул пабмед Google ученый
Klarner T, Barss TS, Sun Y, Kaupp C, Loadman PM, Zehr EP. Использование межконечностных соединений рук и ног для реабилитации при ходьбе: тренировочное вмешательство при инсульте. J Neural Transplant Plast. 2016; 2016: 1517968–8019.
https://doi.org/10.1155/2016/1517968.Артикул Google ученый
Столофф Р.Х., Зер Е.П., Феррис Д.П. Лежачий шаг имеет аналогичный, но более простой нейронный контроль по сравнению с ходьбой. Опыт Мозг Res. 2006;178(4):427–38. https://doi.org/10.1007/s00221-006-0745-7.
Артикул пабмед Google ученый
Добкин Б.Х., Харкема С.Дж., Рекехо П., Эдгертон В.Р. Модуляция локомоторной активности ЭМГ у лиц с полным и неполным повреждением спинного мозга. Джей НейроРеабилитация. 1995;9(4):183–90.
КАС Google ученый
Harkema SJ, Hurley SL, Patel UK, Requejo PS, Dobkin BH, Edgerton VR. Пояснично-крестцовый отдел спинного мозга человека интерпретирует нагрузку при шагании. J Нейрофизиол. 1997;77(2):797–811. https://doi.org/10.1152/jn.1997.77.
2.797.КАС Статья пабмед Google ученый
Эдгертон В.Р., Рой Р.Р., Ходжсон Дж.А., Пробер Р.Дж., де Гузман С.П., де Леон Р. Физиологическая основа разработки реабилитационных стратегий для пациентов с травмами позвоночника. J Am Paraplegia Soc. 1991;14(4):150–7. https://doi.org/10.1080/01952307.1991.11735848.
КАС Статья пабмед Google ученый
Gottschall JS, Kram R. Энергозатраты и мышечная активность, необходимые для движения ногой во время ходьбы. J Appl Physiol. 2005;99(1):23–30. https://doi.org/10.1152/japplphysiol.01190.2004.
Артикул пабмед Google ученый
Доке Дж., Донелан Дж.М., Куо А.Д. Механика и энергетика качания ноги человека. J Эксперт Биол. 2005; 208: 439–45. https://doi.org/10.1242/jeb.01408.
Артикул пабмед Google ученый
Бальестерос М.Л., Бухталь Ф., Розенфальк П. Характер мышечной активности во время маха руками при естественной ходьбе. Acta Physiol Scand. 1965; 63: 296–310. https://doi.org/10.1111/j.1748-1716.1965.tb04069.Икс.
КАС Статья пабмед Google ученый
Arellano CJ, Kram R. Метаболические издержки человеческого бега: стоит ли размахивать руками? J Эксперт Биол. 2014; 217:2456–61. https://doi.org/10.1242/jeb.100420.
Артикул пабмед Google ученый
Gottschall JS, Kram R. Затраты энергии и мышечная активность, необходимые для движения вперед во время ходьбы.
J Appl Physiol. 2003;94 (5): 1766–1772. https://doi.org/10.1152/japplphysiol.00670.2002.Артикул пабмед Google ученый
Neptune RR, Kautz SA, Zajac FE. Вклад отдельных подошвенных сгибателей голеностопного сустава в поддержку, продвижение вперед и начало поворота во время ходьбы. Дж. Биомех. 2001;34(11):1387–98. https://doi.org/10.1016/S0021-9290(01)00105-1.
КАС Статья пабмед Google ученый
Kuhtz-Buschbeck JP, Jing B. Активность мышц верхних конечностей при ходьбе человека. J Электромиогр Кинезиол. 2012;22(2):199–206. https://doi.org/10.1016/j.jelekin.2011.08.014.
Артикул пабмед Google ученый
Ян Дж.Ф., Винтер Д.А. Электромиографические методы нормализации амплитуды: повышение их чувствительности в качестве диагностических инструментов при анализе походки.
Arch Phys Med Rehab. 1984;65(9):517–21.КАС Google ученый
Зимний Д.А. Биомеханика и двигательная регуляция движений человека. Нью-Джерси: Уайли; 2009.
Книга Google ученый
Броквей Дж.М. Вывод формул, используемых для расчета расхода энергии у человека. Хум Нутр Клин Нутр. 1987; 41: 463–71.
КАС пабмед Google ученый
Санчес Н., Симха С.Н., Донелан Дж.М., Финли Дж.М. Использование внешней механической работы для снижения метаболических затрат: механика и энергетика ходьбы на беговой дорожке с расщепленным ремнем. Дж. Физиол. 2019;597(15):4053–68. https://doi.org/10.1113/jp277725.
Артикул пабмед Google ученый
Гонабади А.М., Антонеллис П.
, Малкольм П. Система для простой роботизированной помощи при ходьбе с линейными импульсами в центре масс. IEEE Trans Neural Syst Rehabil Eng. 2020;28(6):1353–62. https://doi.org/10.1109/tnsre.2020.2988619.Артикул пабмед ПабМед Центральный Google ученый
Махарадж Дж. Н., Крессвелл А. Г., Лихтварк Г. А. Сухожильная ткань передней большеберцовой мышцы играет ключевую роль в поглощении энергии при ходьбе человека. J Эксперт Биол. 2019;222(11):jeb1
. https://doi.org/10.1242/jeb.1
.
Артикул пабмед Google ученый
Коллинз С.Х., Адамчик П.Г., Куо А.Д. Динамическое качание руки при ходьбе человека. Proc R Soc B. 2009 г.;276(1673):3679–88. https://doi.org/10.1098/rspb.2009.0664.
Артикул пабмед ПабМед Центральный Google ученый
Pontzer H, Holloway JH, Raichlen DA, Lieberman DE. Контроль и функция размаха рук при ходьбе и беге человека. J Эксперт Биол. 2009 г.;212(6):894. https://doi.org/10.1242/jeb.030478.
Артикул Google ученый
Чанг Ю. Х., Крам Р. Метаболические затраты на создание горизонтальных сил во время бега человека. J Appl Physiol. 1999;86(5):1657–62. https://doi.org/10.1152/jappl.1999.86.5.1657.
КАС Статья пабмед Google ученый
Хуан Х.Дж., Феррис Д.П. Усилия верхних конечностей не увеличивают максимальную произвольную мышечную активацию у лиц с неполным повреждением спинного мозга.
Клин Нейрофизиол. 2009 г.;120:1741–9. https://doi.org/10.1016/j.clinph.2009.07.038.Артикул пабмед ПабМед Центральный Google ученый
Галле С., Малкольм П., Дерав В., Де Клерк Д. Адаптация к ходьбе с экзоскелетом, помогающим разгибать лодыжку. Осанка походки. 2013;38(3):495–9. https://doi.org/10.1016/j.gaitpost.2013.01.029.
КАС Статья пабмед Google ученый
Коллинз С.Х., Виггин М.Б., Савицки Г.С. Снижение затрат энергии на ходьбу человека с помощью экзоскелета без двигателя. Природа. 2015;522(7555):212–5. https://doi.org/10.1038/nature14288.
КАС Статья пабмед ПабМед Центральный Google ученый
Уотерс Р.Л., Малрой С. Расход энергии при нормальной и патологической походке. Осанка походки. 1999;9(3):207–31.
https://doi.org/10.1016/s0966-6362(99)00009-0.КАС Статья пабмед Google ученый
LaStayo PC, Reich TE, Urquhart M, Hoppeler H, Lindstedt SL. Постоянные эксцентрические упражнения: улучшение мышечной силы может происходить при незначительном потреблении кислорода. Am J Physiol. 1999;276(2):611–5. https://doi.org/10.1152/ajpregu.1999.276.2.R611.
Артикул Google ученый
LaStayo PC, Ewy GA, Pierotti DD, Johns RK, Lindstedt S. Положительные эффекты негативной работы: увеличение мышечной силы и снижение риска падения у ослабленных пожилых людей. Дж Гертонтол. 2003;58(5):M419–24. https://doi.org/10.1093/gerona/58.5.m419.
Артикул Google ученый
Хуан Х.Дж., Феррис Д.П. Нервная связь между верхними и нижними конечностями при ходьбе лежа.
J Appl Physiol. 2004; 97: 1299–308. https://doi.org/10.1152/japplphysiol.01350.2003.Артикул пабмед Google ученый
Visintin M, Barbeau H. Влияние параллельных брусьев, поддержки веса тела и скорости на модуляцию локомоторного паттерна спастической паретичной походки. Предварительное общение. Параплегия. 1994;32(8):540–53. https://doi.org/10.1038/sc.1994.86.
КАС Статья пабмед Google ученый
Zehr EP, Duysens J. Регуляция движений рук и ног при передвижении человека. Нейробиолог. 2004;10(4):347–61. https://doi.org/10.1177/1073858404264680.
Артикул пабмед Google ученый
Умбергер Б.Р. Затраты на фазу стойки и поворота при ходьбе человека. Интерфейс JR Soc. 2010;7(50):1329–40. https://doi.org/10.1098/rsif.2010.0084.
Артикул пабмед ПабМед Центральный Google ученый
Гудриан М., Джонкерс И., Ван Дин Д.Х., Брюйн С.М. Махи руками при ходьбе человека: какова их движущая сила? Осанка походки. 2014;40(2):321–6. https://doi.org/10.1016/j.gaitpost.2014.04.204.
Артикул пабмед Google ученый
Ссылки на скачивание
Благодарности
Мы благодарим Шернис А. Томас, Джемму Малагон и Дэнни Гевару за их помощь во время сбора данных. Мы также благодарим субъектов за их участие и терпение. Мы также хотели бы выразить нашу признательность за проницательные отзывы, предоставленные рецензентами. Мы также признательны доктору Хелен Дж. Хуанг (Университет Центральной Флориды) за ее подробные обсуждения и отзывы о нашей работе. Оба оказались неоценимыми в улучшении качества рукописи.
Финансирование
Это исследование было поддержано институциональным финансированием через Летнюю студенческую и исследовательскую стипендию Университета Хьюстона (SURF), присужденную Д.В. и грант факультета проректора, присужденный C.J.A.
Информация об авторе
Авторы и организации
Департамент здоровья и работоспособности человека, Центр нейромоторных и биомеханических исследований, Хьюстонский университет, 3875 Holman St.
, Rm 104 Garrison, Houston, TX, 77204-6015, USA Дейзи Вега и Кристофер Дж. Арельяно
Авторы
- Daisey Vega
Посмотреть публикации автора
Вы также можете искать этого автора в PubMed Google Scholar
- Christopher J. Arellano
Просмотр публикаций автора
Вы также можете искать этого автора в PubMed Google Scholar
Contributions
Д.В. и C.J.A. участвовал в концептуализации, разработке и тестировании устройств, методологии, формальном анализе, интерпретации данных и написании рукописи. Д.В. участвовал в наборе испытуемых, исследовании и визуализации данных. C.J.A. осуществлен надзор и получено финансирование. Все авторы прочитали и одобрили окончательный вариант рукописи.
Автор, ответственный за переписку
Переписка с Кристофер Дж. Арельяно.
Декларация этики
Утверждение этики и согласие на участие
Это исследование было одобрено Институциональным наблюдательным советом Университета Хьюстона (STUDY00001219). Все субъекты предоставили информированное письменное согласие на участие в этом исследовании.
Согласие на публикацию
В форму согласия, одобренную Институциональным наблюдательным советом Хьюстонского университета, было включено следующее заявление: «Результаты этого исследования могут быть опубликованы в научных журналах, профессиональных публикациях или в учебных презентациях; однако никакие отдельные субъекты не будут идентифицированы, и поэтому ваше имя и другая идентифицирующая информация будут храниться в тайне». Поэтому все испытуемые, участвовавшие в нашем исследовании, дали письменное согласие на публикацию своих данных, сохраняя при этом конфиденциальность своей личности.
Конкурирующие интересы
Авторы заявляют, что у них нет конкурирующих интересов.
Дополнительная информация
Примечание издателя
Springer Nature остается нейтральной в отношении юрисдикционных претензий в опубликованных картах и институциональной принадлежности.
Дополнительная информация
Дополнительный файл 1.Фотография системы канатных шкивов рука-нога, беговой дорожки с расщепленным ремнем и пользователя. Эта фотография была сделана во время пилотного тестирования, где мы разработали стандартный протокол для прикрепления устройства к каждому субъекту (как описано в разделе «Методы»). Обратите внимание, что здесь не показаны отражающие маркеры, датчики ЭМГ, тензодатчики и метаболическая тележка. Также обратите внимание, что все наши испытуемые были проинструктированы носить шорты и майку, что позволило бы правильно разместить датчики ЭМГ и отражающие маркеры на теле.
Дополнительный файл 2: Рисунок S1.Средние кривые ансамбля для каждого субъекта. Описание: На этом рисунке представлены средние ансамблевые кривые вспомогательной силы, горизонтальной GRF, вертикальной GRF, относительных углов суставов (плечо, локоть, бедро, колено и лодыжка) для каждого субъекта.
Дополнительный файл 3: Таблица S1. Средние данные ЭМГ для испытуемых во время торможения, пропульсивной фазы и фазы качания при ходьбе. Этот файл содержит таблицы, содержащие описательную и выводную статистику данных аЭМГ всех оцениваемых мышц (PD, AD, TRI, BIC, BF, RF, SOL, MG и TA) во время их соответствующей фазы ходьбы.
Дополнительный файл 4. Репрезентативный субъект, идущий с системой канатных шкивов рука-нога (ходьба с помощью). Это видео показывает объект в виде трехмерного тела, созданного отражающими маркерами, а также показывает натяжение правой веревки (т. е. вспомогательную силу) и сигналы правой силовой пластины (т. е. горизонтальные силы, создаваемые правой ногой). Видео фиксирует один цикл ходьбы и выделяет ключевые детали из обсуждения, чтобы помочь зрителю визуализировать соединение веревки руки и ноги и беговую дорожку. Обратите внимание, что сигнал, иллюстрирующий силы, генерируемые в передне-заднем направлении, отображается в программном обеспечении как силы «действия». Таким образом, силы «реакции» просто противоположны по направлению.
Права и разрешения
Открытый доступ Эта статья находится под лицензией Creative Commons Attribution 4.0 International License, которая разрешает использование, совместное использование, адаптацию, распространение и воспроизведение на любом носителе или в любом формате, при условии, что вы укажете соответствующую ссылку на оригинальный автор(ы) и источник, предоставьте ссылку на лицензию Creative Commons и укажите, были ли внесены изменения. Изображения или другие сторонние материалы в этой статье включены в лицензию Creative Commons на статью, если иное не указано в кредитной строке материала. Если материал не включен в лицензию Creative Commons статьи, а ваше предполагаемое использование не разрешено законом или выходит за рамки разрешенного использования, вам необходимо получить разрешение непосредственно от правообладателя. Чтобы просмотреть копию этой лицензии, посетите http://creativecommons. org/licenses/by/4.0/. Отказ Creative Commons от права на общественное достояние (http://creativecommons.org/publicdomain/zero/1.0/) применяется к данным, представленным в этой статье, если иное не указано в кредитной линии данных.
Перепечатка и разрешения
Об этой статье
Система шкивов для детей (простая механика) • Блог о мероприятиях для детей
ByDeirdre Обновлено
Сегодня мы с детьми поговорим о том, как сделать шкив!
Ваши дети никогда не будут слишком маленькими, чтобы узнать о таких простых механизмах, как шкив. Несмотря на то, что шкивы выглядят простыми и элементарными, на самом деле они представляют собой мощные машины, лежащие в основе многих машин, с которыми мы взаимодействуем каждый день.
Мы в блоге Kids Activity Blog считаем, что наука для детей должна быть практической и всегда веселой. Это одна из причин, почему мы так любим науку. Это игра!
Простые механизмы всегда очаровывали моего сына. Он любит их строить и исследовать.
Простые машинки для детей
Что такое простая машинка?
Простые механизмы окружают нас повсюду и облегчают нашу работу. При объединении простых машин получается составная машина. —НАСА
Простая машина, любое из нескольких устройств с небольшим количеством движущихся частей или без них, которые используются для изменения движения и величины силы для выполнения работы. Это самые простые известные механизмы, которые могут использовать рычаг (или механическое преимущество) для увеличения силы. — Britannica
Идентифицировано 6 простых машин. Попросите детей следить за тем, что их окружает:
- Шкив
- Рычаг
- Колесо и ось
- Клин
- Наклонная плоскость
- Винт
Сегодня мы хотим изучить шкив!
Сделать систему шкивов
Сделав ему мобиль для комнаты моего сына, я посмотрел на пустую катушку с лентой, оставшуюся от ленты на мобиле. Было бы идеально, я решил сделать шкив.
Мы с сыном собрали еще несколько материалов, чтобы сделать самодельный шкив для катушки с лентой.
Расходные материалы, которые мы использовали для самодельной системы шкивов
Обязательно замените то, что у вас есть в доме! Это простая машина, которую можно сделать из самых разных вещей.
- Два пластыря
- Пустая катушка с красящей лентой
- Пластиковая чашка для яблочного пюре
- Палочки для еды
- Пряжа
- Дырокол
- Пластиковые солдатики
Как сделать простую систему шкивов
- Проделайте три отверстия в чашке для яблочного пюре.
- Отрежьте три куска пряжи одинаковой длины.
- Протяните один конец каждой нити через отверстие в чашке.
- Свяжите свободные концы пряжи вместе.
- Привяжите очень длинный кусок пряжи к трем деталям, которые вы только что связали вместе.
- Приклейте другой конец длинной нити к внутренней стороне катушки с лентой.
- Оберните пряжу вокруг катушки с лентой.
- Наклейте лейкопластырь на каждый конец палочки для еды. Пластыри предотвратят трение палочки для еды о дерево перил или там, где вы закрепляете шкив.
- Наденьте катушку с лентой на палочку для еды.
- Найдите место, где можно использовать шкив. Длина ваших палочек для еды может определить это.
Наш опыт создания простой системы шкивов
После того, как вы создали свой шкив, вам нужно будет установить его в том месте, где вы хотите его использовать. Мы установили свой шкив на лестнице. Палочки для еды были размещены за двумя секциями наших перил. Если у вас есть изголовье кровати или стула с рейками, вы можете установить там свой шкив.
Для работы со шкивом мой сын подталкивал катушку к себе одной рукой и держал один конец палочки для еды. Простое скручивание рулона ленты тоже сработало бы.
Веселее, когда есть что поднять с помощью шкива. В свой мы поместили пару пластмассовых армейцев. Они легкие и маленькие. Они сделали отличные предметы для подъема.
Другие занятия для детей по науке и STEM
Существует несколько типов простых механизмов, и даже маленькие дети могут с удовольствием изучать их, выполняя правильные практические действия. Мы будем рады узнать, пытался ли ваш ребенок сделать блок.
Мы думаем, вам понравятся эти идеи для более увлекательных занятий для детей:
- Вот еще один способ, которым мы сделали простую машину со шкивом, и дети будут учиться, играя, и узнавать, как она работает.
- Сделайте автомобильный шкив для детей, отправляющихся в путешествие!
- Попробуйте очень простой способ сделать лодку из алюминиевой фольги.
- Посмотрите наш простой способ сложить бумажный самолетик, а затем используйте его в испытании STEM!
- Попробуйте эту оригами-лягушку для веселого эксперимента с кинетической энергией дома.
- Нам нравится использовать LEGO STEM! Из кирпичиков, которые есть у вас дома, получаются отличные простые механизмы.
- Попробуй это соломенное испытание и сделай самые удивительные вещи!
- В этом инженерном задании для детей используются красные чашки.
- Наука — это очень весело с этим рецептом гигантского пузыря!
- Найдите еще много научных экспериментов для детей.
- И еще куча интересных занятий STEM для детей.
Каким получился ваш самодельный шкив?
Deirdre
Deirdre Smith пишет/владеет мамой JDaniel4. После двадцати лет работы учителем начальной школы и учителем технологий в Северной Вирджинии, она стала домохозяйкой в северной части штата Южная Каролина. В ее блоге рассказывается о том, как она и ее 5-летний ребенок изучают учебу, мастерят, готовят здоровую пищу и живут полной жизнью. Дейдру также можно найти в твиттере под именем @jdaniel4smom и на странице ее блога в FB. Вы также можете проверить ее на Google+.
Конструкция машины 101: Шкивы и противовесы
Шкивы и противовесы веками использовались для получения механических преимуществ в военных машинах и промышленном оборудовании. Физика, стоящая за ними, довольно проста, но их важность имеет первостепенное значение.
В современном мире шкивы и противовесы используются в самых разных областях. Например, при каждом движении лифта задействуется система шкивов и противовесов. С точки зрения конструкции машины, шкивы, пожалуй, самый простой способ получить механическое преимущество. Еще одним распространенным способом увеличения выходной силы в современной механике являются рычаги, функции которых очень похожи на шкивы.
Что такое шкив и что такое шкивные системы?
Не вдаваясь во все различные устройства шкивов, в своей основе шкивы имеют колесо и канат. Шкив только с одним фиксированным колесом просто меняет направление входной силы по отношению к притягиваемой массе. Имея только одно колесо, чтобы поднять массу 100 кг (220 фунтов), вам нужно будет приложить к другому концу веревки силу, эквивалентную 100 кг (1000 ньютонов).
Когда к простой машине, которая представляет собой систему шкивов, добавляется больше колес или блоков, вы получаете все больше и больше механических преимуществ. С системой из 2 колес вы можете поднять 100-килограммовый груз, приложив всего 50 кг (110 фунтов) силы, эквивалентной веревке.
Расчет входных усилий становится немного сложнее, чем больше блоков вы добавляете, а также с различными вариантами настройки. Однако даже самые сложные системы шкивов можно понять, если сложить длины различных отрезков каната и составить уравнения на основе производных.
Пример составной системы шкивов, в которой уравнения силы подписаны и записаны. Внимательно изучите все различные уравнения, чтобы получить представление о том, как математически моделируются системы шкивов. Источник: Prolineserver/Wikimedia. Это может показаться правдой, если вы сосредоточитесь на входе и выходе, но масса того, что поднимается, всегда переводится в фиксированные точки, где шкивы прикреплены к вашей жесткой системе. Все это можно рассчитать с помощью простой физики. Физический пример очень сложного шкивного механизма, который четко обозначает механическое преимущество, создаваемое каждой установкой. Подобные многослойные шкивы могут обеспечить наибольшую передачу усилия. Источник: StromBer/Wikimedia Вместо того, чтобы преобразовывать силы, мы можем сказать, что система блоков и канатов управляет силами, чтобы максимизировать массу, которую вы можете поднять или переместить.
Достижение механических преимуществ с помощью противовесов
Теперь, когда у нас есть общее представление о системах шкивов, мы можем углубиться в системы противовесов, чтобы получить еще больше механических преимуществ в конструкции машины. Противовесы используются как в шкивных системах, таких как лифты, так и в рычажных системах, таких как кран. Что касается противовесов крана, все дело в моментах.
Самый популярный
Чтобы сохранить жесткость стрелы крана при подъеме груза массой 100 кг на расстоянии 10 м (32 фута) от точки опоры, вам потребуется противовес массой 1000 кг (2200 фунтов), расположенный на расстоянии 1 м (3,2 фута) от точки опоры. точки опоры с другой стороны для стабилизации стрелы крана. В кранах противовесы обычно поддерживают постоянную массу, поэтому для регулировки различных нагрузок противовес обычно может перемещаться для регулировки момента. Это, очевидно, очень примитивное объяснение противовесов крана. Однако это отличный пример того, как шкивы создают механическое преимущество в системах, в которых они используются.
СВЯЗАННЫЕ: ИНЖЕНЕР ОБНАРУЖАЕТ СКРЫТОЕ ЗНАНИЕ ДАВИНЧИ О ТРЕНИИ
С точки зрения систем шкивов, противовес просто помогает приложить входную силу для подъема объекта. Самый простой способ продемонстрировать это — взглянуть на лифтовую систему. В типичных лифтах к другому концу системы шкивов прикреплен противовес, эквивалентный весу кабины при 50% нагрузке. Противовесы не выполняют всю работу в современных лифтах, но они помогают стабилизировать систему и снизить нагрузку на двигатель лифта.
Ниже приведены несколько различных примеров шкивов, чтобы увидеть, как они влияют на заданный вес.
Пример множества различных шкивов и сил, действующих в каждой конструкции. Вы можете видеть, что чем больше шкивов добавляется, тем меньше силы требуется для перемещения блока на такое же перемещение. Однако расстояние, на котором должна быть применена сила, также больше. Источник: Prolineserver/Wikimedia Если предположить, что кабина лифта загружена на 25 % от ее грузоподъемности, все, что нужно двигателю, — это затормозить кабину лифта на нужном этаже (при подъеме). Противовес в лифте также означает, что если моторный тормоз выйдет из строя, падение автомобиля будет замедлено так же быстро, как и в противном случае. Лифтовые системы в целом немного сложнее, чем описано здесь, но противовесы составляют суть их функции.
Дополнительная информация о шкивах
В частности, Destin с канала YouTube Smarter Every Day обсуждает тип шкивов, называемых рывковыми блоками. Этот тип шкива позволяет легко продевать через них веревку, так как они расходятся посередине. Это избавляет пользователя от необходимости продевать веревку или цепь через шкив в начале использования. Таким образом, рывковые блоки — отличный способ использовать физику шкивов и их механические преимущества на лету.
More Stories
здоровьеСоединение в «волшебных грибах» обеспечивает быстрое и стойкое облегчение депрессии
Derya Özdemir| 21.02.2022
наукаУченые обнаружили 100-летнюю математическую ошибку, изменившую восприятие цвета людьми
Пол Ратнер| 11.09.2022
инновацииРакета Blue Origin взорвалась, но система эвакуации капсулы сработала
Крис Янг| 13. 09.2022
10 примеров простых машин со шкивом в повседневной жизни — StudiousGuy
Блок — это простой механизм, состоящий из колеса с желобками и веревки, проволоки или цепи. Это одна из старейших машин, впервые представленная в 1500 г. до н.э. жителями Месопотамии. В шкивном механизме к одному концу каната прилагается нагрузка, а к другому концу прикладывается усилие. Приложенная сила отвечает либо за подъем, либо за опускание груза. Как следует из названия, шкивный механизм используется для легкого вытягивания или подъема предметов. Еще в старые времена первоначальной задачей шкива было поднимать тяжелые предметы, такие как ведро, наполненное водой; однако в современном мире система шкивов используется в широком спектре повседневных и коммерческих приложений. В зависимости от типа применения система шкивов может иметь фиксированную ось, подвижную ось или их комбинацию.
Указатель статей (щелкните, чтобы перейти)
1. Колодцы Скважины — одно из старейших приложений, использующих шкив. Чтобы черпать воду из колодца, ручку ведра привязывают к одному концу веревки и бросают в колодец. Другой конец веревки дается пользователю, который прикладывает к нему тяговое усилие. Ось подвижного шкива помогает уменьшить величину входной силы при вытягивании ведра, наполненного водой, из колодца.
Одним из наиболее распространенных применений шкивного механизма в машиностроении является строительство лифтов. Лифты / подъемник используют высокопрочные канаты, которые помогают перемещать его вверх и вниз в соответствии с требованиями пользователя. При отсутствии шкива требуется сложное расположение тяжелых двигателей, которые тянут тросы и тем самым заставляют лифт двигаться.
3. Тренажеры Ряд тренажеров и тренажеров состоит из веревки, на одном конце которой закреплены грузы, а другой конец веревки проходит через шкив и передается пользователю. Когда пользователь тянет свободный конец веревки, сила передается на тело пользователя, помогая ему/ей укреплять мышцы. В большинстве канатных тренажеров, используемых в центрах спортивной подготовки, например, в тросовых тягах сидя, используется тросо-шкивная конструкция, и их обычно называют шкивными тренажерами.
В отличие от обычных штор, театральный занавес не задергивается вручную. Используется отдельный механизм, который помогает пользователю сворачивать и разворачивать театральные шторы с помощью шнура. Когда шнур опускается, шторы поднимаются с помощью шкивного механизма. Здесь шкив используется для уменьшения усилий, необходимых для опускания занавеса на сцену или со сцены.
5. Строительное оборудование Роликовый механизм значительно облегчает подъем тяжелых предметов по сравнению с подъемом веса вручную. Следовательно, он чаще всего используется в строительной технике, которая требует подъема и выгрузки тяжелых и громоздких предметов. Некоторые из строительных машин, в которых используется шкивный механизм, — это краны, орудийная снасть, дворовая и талевая снасть.
Флагштоки обычно очень высокие, что делает подъем флага вручную очень сложной задачей. Однако, если для выполнения задачи используется механизм из веревки и шкива, она становится легкой и кажется легкой. Чтобы развернуть флаг на флагштоке с помощью шкивов, пользователь прикрепляет веревку к флагу и тянет за веревку. Когда веревка, прикрепленная к вершине шеста, тянется через шкив, это заставляет флаг двигаться вверх.
7. ЖалюзиЖалюзи на окне очень плавно поднимаются и опускаются. Для этой цели используется простая шкивная машина. Шнур шторки крепится к оси колеса шкива. Следовательно, когда шнур натягивается, шкив заставляет жалюзи подниматься.
8.
Скалолазы Скалолаз использует шкив для облегчения процесса лазания. Механизм шкива обычно используется для отклонения или изменения направления приложения силы. Когда альпинист тянет веревку вниз, система шкивов помогает ему двигаться вверх.
9. Гаражные воротаГаражные ворота довольно громоздки и тяжелы, что затрудняет управление ими вручную. Чтобы упростить этот процесс, к верхним углам гаражных ворот прикрепляют набор из четырех шкивов. Эти шкивы соединены с помощью струны с малой массой, которая помогает двери плавно двигаться вверх и вниз.
10. Паруса на паруснике На парусниках и кораблях используется один шкив или механизм из нескольких шкивов для подъема тяжелых парусов и груза. Это делается с помощью простой веревки, которую тянут вниз, в результате чего тяжеловес, присутствующий на другом конце, поднимается вверх. Чтобы еще больше облегчить этот процесс, используемый шкив состоит из шарикоподшипников, что обеспечивает плавность хода.